Как правило, при использовании обычного двигателя необходима установка механической передачи (редуктора) между ним и производственным механизмом, понижающей частоту вращения привода до требуемого значения. Наличие механической передачи снижает надежность работы системы электропривода, увеличивает его массу, габариты и стоимость, создает дополнительный шум при работе.
Двигатели переменного тока с электромагнитным снижением (редуцированием) частоты вращения, которые получили название редукторных, свободны от этого недостатка.
Следует отметить, что эти двигатели имеют невысокие энергетические показатели работы — коэффициент их полезного действия составляет около 40%, а коэффициент мощности не превышает 0,2. Поэтому такие двигатели в настоящее время выпускаются на мощности до нескольких десятков ватт.
Представление о многообразии возможных типов тихоходных двигателей переменного тока дает их классификационная схема (рис. 1).
Рассмотрим основные виды тихоходных редукторных двигателей, начав с синхронных двигателей. Принцип действия и устройство этих двигателей по существу уже были рассмотрены. Важнейшее их отличие заключается лишь в характере вращения магнитного поля и ротора: для шагового двигателя это вращение дискретное, а для редукторного синхронного двигателя — непрерывное. Магнитное поле редукторных двигателей образуется, как и в обычных двигателях переменного тока, с помощью обмоток, подключаемых к сети переменного тока.
Во всем остальном основные конструктивные схемы синхронного редукторного двигателя соответствуют реактивному и индукторному шаговым двигателям, изображенным на рис. 4. Отметим, что схема конструкции на рис. 5 применительно к редукторным двигателям называется схемой с осевым или униполярным возбуждением постоянными магнитами, причем сами постоянные магниты могут быть заменены электромагнитами.
Наряду с осевым используется радиальное возбуждение двигателя в трех вариантах: с электромагнитным возбуждением, самовозбуждением и возбуждением от постоянных магнитов.

Рис. 1. Классификация редукторных двигателей.
При электромагнитном возбуждении статор имеет две обмотки — основную (двух- или трехфазную) с числом пар полюсов р, которая создает вращающееся магнитное поле, и однофазную обмотку возбуждения, питающуюся от сети постоянного тока. Обмотка возбуждения укладывается в пазы статора и имеет определенный шаг для устранения трансформаторной связи с обмоткой переменного тока. Степень снижения (редукции) частоты вращения ротора % по отношению к частоте вращения магнитного поля двигателя п0 определяется коэффициентом электромагнитной редукции kv, который определяется по формуле
где р — число пар полюсов основной обмотки статора.
Синхронный двигатель с самовозбуждением имеет ту же конструкцию, что и при электромагнитном возбуждении. Однако обмотка возбуждения уложена в пазы статора таким образом, чтобы образовалась трансформаторная связь с основной обмоткой переменного тока. Поэтому при подключении последней к сети переменного тока в обмотке возбуждения наводится напряжение переменного тока. С помощью включенных в цепь обмотки возбуждения полупроводниковых вентилей это напряжение выпрямляется и по ней начинает протекать выпрямленный ток, который создает магнитный поток постоянного направления, как и при независимом электромагнитном возбуждении.
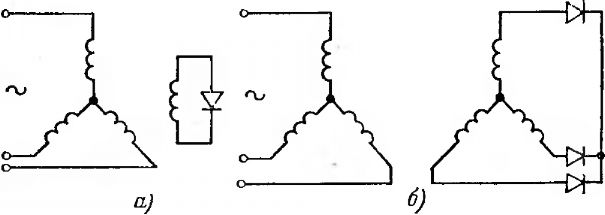
Рис. 2. Схемы соединения обмоток синхронного редукторного двигателя.
а — с однофазной обмоткой самовозбуждения; 6 — с трехфазной обмоткой самовозбуждения.
На рис. 2 показаны возможные электрические схемы включения обмоток двигателя. По своим рабочим характеристикам двигатель с самовозбуждением несколько уступает двигателю с независимым электромагнитным возбуждением, что объясняется пульсирующим характером тока возбуждения.
Синхронный тихоходный двигатель с постоянными магнитами имеет постоянные магниты, расположенные на роторе. При этом принципиальным является неравенство числа пар полюсов р вращающегося магнитного поля и числа пар полюсов ротора рР, причем рр должно быть больше р в определенное число раз.
Работу такого двигателя можно проиллюстрировать с помощью схемы конструкции реактивного шагового двигателя на рис. 4, если представить себе, что ротор выполнен не из ферромагнитного материала, а является многополюсным постоянным магнитом, каждый полюс которого соответствует каждому зубцу. Коэффициент электромагнитной редукции kp для этого типа двигателя может быть определен по формуле

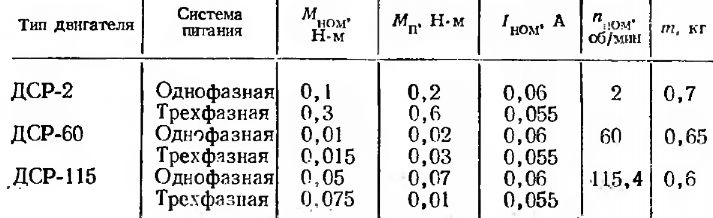
Отечественной электропромышленностью выпускаются синхронные тихоходные двигатели серии ДСР. Эти двигатели предназначены для питания от сети переменного тока частотой 50 Гц и напряжением 220 В и могут иметь трехфазную или однофазную систему питания. В последнем случае для получения вращающегося магнитного поля используется постоянно включенный конденсатор.
Двигатели могут работать при температуре окружающей среды от —60 до +70°С, давлении от 200 до 780 мм рт. ст. и относительной влажности воздуха 95% при температуре 40°С.
Технические данные двигателей представлены в табл. 1, где также указан пусковой момент двигателя Мп.
Для получения более низких скоростей двигатели серии ДСР снабжаются механическим редуктором.
Таблица 1
Помимо синхронных редукторных двигателей, практическое распространение получили асинхронные двигатели, построенные по тому же принципу.
Статор такого двигателя конструктивно не отличается от статора синхронного двигателя и также имеет две обмотки с различными числами пар полюсов р\ и pi. Основная обмотка с числом пар полюсов р\ подключается к сети переменного тока, а вторая закорачивается или подключается к активному или реактивному сопротивлению. На рис. 26 показан один из вариантов включения трехфазных обмоток тихоходного асинхронного двигателя при замыкании вторичной обмотки на емкость. Обмотки уложены в пазы статора таким образом, что между ними отсутствует трансформаторная связь.
Принцип действия двигателя аналогичен принципу действия так называемого обращенного асинхронного двигателя, у которого замкнутая вторичная обмотка находится на статоре, а первичная — на роторе. Роль своеобразной первичной обмотки выполняет зубчатый ротор (с числом зубцов Zp), возбуждаемый основной статорной обмоткой. При работе двигателя зубчатый ротор своим магнитным полем индуцирует во вторичной замкнутой обмотке ЭДС с частотой f2=fs, где s — скольжение двигателя, аналогичное понятию скольжения обычных асинхронных двигателей. Под действием ЭДС во вторичной обмотке потечет ток, взаимодействие которого с магнитным полем в зазоре двигателя создаст вращающий момент.
Частота вращения ротора асинхронного редукторного двигателя определяется формулой
В табл. 2 приведены технические данные опытных образцов асинхронных двигателей этого типа.
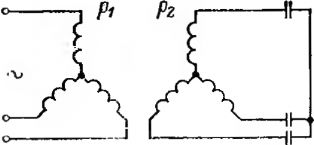
Рис. 26. Схема включения обмоток асинхронного редукторного двигателя.
Двигатели этой серии имеют трехфазную основную обмотку с двумя парами полюсов р—2 (кроме двигателя АРД-4, у которого р=4). Вторичная обмотка всех
двигателей, кроме АРД-1, — однофазная, замкнутая на емкость. Двигатель АРД-1 имеет трехфазную коротко- замкнутую вторичную обмотку. Отметим, что обычные асинхронные двигатели при р=2 и I—1000 Гц имели бы частоту вращения около 30 000 об/мин, которая на целый порядок выше частоты вращения двигателей серии АРД.
Таблица 2
Тип двигателя | Рном, | "ном1 об/мин | F. Гц | КПД, % | costp |
АРД-1 | 16 | 4420 | 500 | 22 | 0,18 |
АРД-2 | 0,7 | 1 2220 | 1000 | 8 | 0,31 |
АРД-3 | 1,5 | I 2450 | 1000 | 10 | 1 0,34 |
АРД-4 | 8,1 11,1 | 2260 | 1000 | 30,5 | 0,38 |
АРД-5 | ! 3600 | 1000 | 30,6 I | 1 0,28 |
С целью повышения быстродействия редукторных двигателей разработаны конструкции с малоинерционным полым ротором, который может быть как ферромагнитным с зубцами на поверхности, так и немагнитным. В последнем случае полый ротор выполняется с отверстиями, в которые вставляются ферромагнитные зубцы.