Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъемно-транспортные машины, механизмы подач различных станков, прессы, молоты и т. д.). В качестве привода этих механизмов и устройств до недавнего времени использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт — гайка), преобразовывавших вращательное движение двигателей в прямолинейное движение рабочего органа.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надежность работы привода и производственного механизма в целом.
Специфичность конструкции линейного двигателя определила появление и некоторых специальных терминов, применяемых для обозначения отдельных его частей. В настоящее время еще не принята единая система терминологии, поэтому в технической литературе одинаковый смысл вкладываются в понятия: статор — первичный элемент — индуктор, ротор — вторичный элемент — бегун — якорь — реактивная полоса. Часть двигателя, получающая энергию из сети, названа статором (хотя она не всегда является неподвижной частью), а часть двигателя, получающая энергию со статора, названа вторичным элементом.
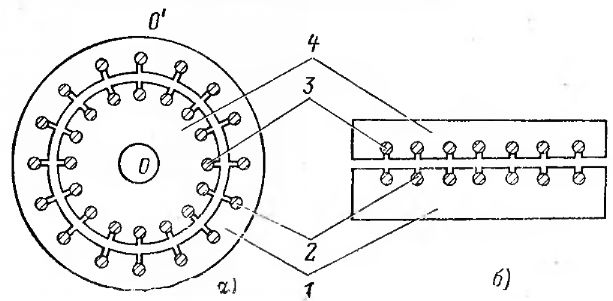
Рис. 1. Принцип построения линейного двигателя переменного тока.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
Наибольшее распространение получили асинхронные линейные двигатели, которые мы и рассмотрим вначале. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис. 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по известному правилу Ленда, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.

Рис. 2. Линейные двигатели.
а — с длинным вторичным элементом; б — с коротким вторичным элементом; в — двухстаторный; г —с сердечником; 5 — со вторичным элементом в виде полосы.
Представленная на рис. 1 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2,а) или короче его (рис. 2,6). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом.
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто — и в этом одно из достоинств линейного асинхронного двигателя — в качестве вторичного элемента используется металлический лист (полоса), как это показано на рис. 2Д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2,в) или между статором и ферромагнитным сердечником (рис. 2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2,в, г. Некоторое распространение получили составные сложные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Отметим, что линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
Разновидностями линейных асинхронных двигателей являются дуговой и трубчатый (коаксиальный) двигатели.
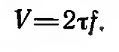
Рис. 3. Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3. Особенностью этого двигателя является зависимость частоты вращения его ротора I от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу сс=2тр, где т — длина полюсного деления и р — число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол. а в течение
а в течение
одной минуты поле повернется на оборотов, т. е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
оборотов, т. е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
Одна из типовых конструкций трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении.
Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
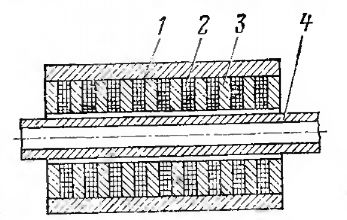
Рис. 4. Трубчатый (коаксиальный) линейный двигатель.
Рассмотрим теперь несколько типовых практических конструкций линейных асинхронных двигателей в совокупности с производственными механизмами.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств.
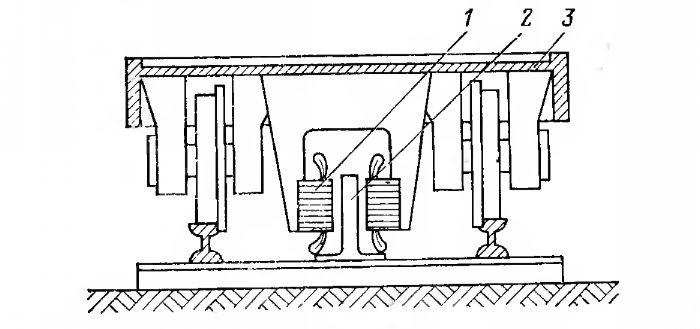
Рис. 5. Сочленение линейного двигателя с транспортным средством.
Другое, не менее важное обстоятельство связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5. Линейный двигатель, укрепленный на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укрепленная между рельсами полоса 2. Напряжение на статор двигателя подается с помощью скользящих контактов.
Известны также конструкции линейных двигателей, где вторичным элементом являются рельс или элементы
несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов. На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий. Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укрепленную на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
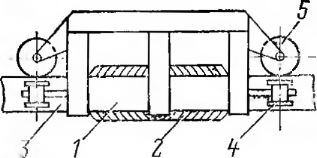
Рис. 6. Линейный двигатель для монорельсовой дороги.

Рис. 7. Линейный двигатель для транспортеров.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота показана па рис. 8. Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Широкое распространение получает линейный двигатель и в легкой промышленности, в частности в текстильном производстве. Примером использования линейного двигателя в текстильной промышленности является привод челнока или прокладчика нити ткацкого станка. Идея такого применения линейных двигателей основывается на принципиальной возможности органического объединения функций челнока и вторичного элемента линейного двигателя.

Рис. 8. Линейный двигатель для сваезабивного молота.
Одна из возможных принципиальных схем ткацкого станка показана на рис. 9. Система электропривода образована двумя цилиндрическими статорами 1 и 2,
снабженными концевыми амортизаторами 3. Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
При нахождении прокладчика в статоре 1 устройство управления 6 подает напряжение на этот статор таким образом, что образовавшееся бегущее магнитное поле выталкивает прокладчик из статора. Прокладчик по направляющему каналу перелетает в другой статор, прокладывая нить, и тормозится там с помощью работающего в тормозном режиме статора 2 и амортизатора 3. Затем устройство управления переключает статор 2 для образования бегущего поля в направлении статора I, а сам статор 1 — в тормозной режим. Цикл перемещения прокладчика повторяется.

Рис. 9. Линейный двигатель для ткацких станков.
Ткацкие станки, выполненные по этому принципу, отличаются высокой производительностью, простотой автоматизации и удобством в обслуживании.
В настоящее время многие отечественные организации и заводы разрабатывают и серийно выпускают линейные асинхронные двигатели, среди них:
двигатели мощностью от нескольких ватт до 660 кВт со скоростями движения от 1,4 до 42 м/с для систем транспорта;
двухстаторные тяговые двигатели мощностью от 5 до 1000 кВт со скоростью движения 8,4—11,2 м/с для промышленного транспорта и различных производственных механизмов;
одностаторные тяговые двигатели для транспорта мощностью 26, 120 и 660 кВт со скоростью движения соответственно 10, 25,2 и 33,6 м/с;
тяговые двигатели с использованием рельса в качестве вторичного элемента;
линейные микродвигатели переменного и постоянного тока для привода машин легкой промышленности и для самопишущих измерительных приборов.
Таблица 1
| Тип привода-толкателя | Номинальное усилие, Н | Ход штока, м | Время хода, с | Полезная мощность, Вт |
ПТЛ-75 | 750 | 0,15 | 0,33 | 330 |
ЛТЛ-150 | 1500 | 0,25 | 0,56 | 660 |
ПТЛ-300 | 3000 | 0,3 | 0,67 | 1320 |
ПТЛ-100 | 1000 | 0,12 | 0,27 | 441 |
ПТЛ-200 | 2000 | 0,2 | 0,4 | 880 |
ПТЛ-600 | 6000 | 0,4 | 0,89 | 2640 |
В табл. 1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
Таблица 2
| Тип двигателя | Мощность, кВт | Скорость бегущего поля, м/с | Среднее пусковое усилие, Н | КПД. % | Масса, кг |
ЛАД 1 | 40 | 12 | 450 | 64 | 690 |
ЛАД 2 | 40 | 18 | 600 | 63 | 700 |
ЛАД 3 | 120 | 12 | 1100 | 70 | 870 |
Для привода слитковозов в прокатном производстве разработаны линейные асинхронные двигатели, технические данные которых приведены в табл. 2.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов. Рассмотрим примеры применения этих двигателей.
На рис. 10 показана схема привода продольного хода стола плоскошлифовального станка с использованием линейного двигателя постоянного тока. На столе 1 станка расположен вторичный элемент (якорь) 2 двигателя. Ток к обмоткам якоря подводится через коллектор 3 и щетки 4, установленные на станине 5 станка. На станине по всей длине хода якоря расположены полюсы двустороннего статора 6, при этом станина является одновременно и магнитопроводом двигателя.
На рис. 11 показана еще одна конструктивная схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.

Рис. 11. Линейный двигатель для транспортировки изделий.
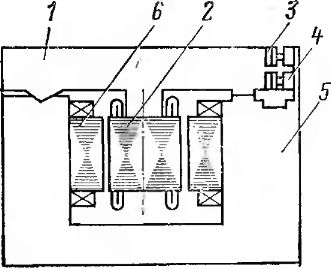
Рис. 10. Линейный двигатель для шлифовального станка.
Подвижная часть двигателя — якорь — состоит из немагнитного остова 1 и укрепленной на нем обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путем ее травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токоподвод к обмотке осуществляется с помощью коллектора 3 и щеток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещенных в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД-насосы) могут быть постоянного или переменного тока. Конструктивная схема МГД-насоса постоянного тока показана на рис. 12.
Первичным элементом — статором двигателя является С-образный электромагнит 1 (для упрощения рисунка его обмотка возбуждения не показана). В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов 3.
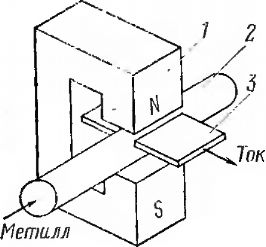
Рис. 12. Магнитогидродинамический насос постоянного тока.
При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле (см. рис. I). Под действием этой силы металл начнет перемещаться по трубопроводу, причем направление его движения просто определить по известному правилу левой руки.
Один из выполненных МГД-насосов этого типа имеет следующие данные: потребляемая мощность 625 кВт, ток 250 000 А, напряжение 2,5 В, КПД 62,5%. Насос обеспечивает транспортировку жидкого натрия при температуре 800°С со скоростью 12,4 м/с по каналу сечением 53x15,2 см2. Номинальный расход насоса 3670 м3/ч при напоре 39 Н/см2.
Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.
Принцип линейного двигателя используется при разработке реактивных плазменных двигателей космических ракет. Модель такого плазменного двигателя можно также изобразить с помощью схемы, приведенной на рис. 12, где место жидкого металла заняла плазма — высокотемпературный (400°С и более) ионизированный и поэтому токопроводящий газ. Электроэнергию для работы такого двигателя предполагается получить с помощью ядерного реактора.
В последние годы все шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице.
Следует при этом отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Рассмотрим конкретные примеры использования линейных синхронных двигателей для транспорта. На рис. 13 показана схема путепровода и вагона электропоезда со скоростью движения 400—500 км/ч, предназначенного для перевозки 100 пассажиров.
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укрепленных под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трехфазная обмотка переменного тока 2 уложена в бетонное полотно дороги и питается от трехфазного инвертора, преобразующего напряжение постоянного тока в трехфазное напряжение переменного тока (здесь кратко рассмотрен принцип действия инвертора). С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
Путепровод 6 представляет собой бетонное полотно шириной 3,7 м, плоский характер поверхности которого выбран с целью снижения накопления льда и снега.

Рис. 13. Линейный синхронный двигатель для привода подвижного состава.
Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлиненных сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, и плоских алюминиевых полос 4, укрепленных в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведенных в алюминиевых полосах 4. Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки (на рисунке не показана) вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов.
Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для ее работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет ее обслуживание, особенно при значительной протяженности дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
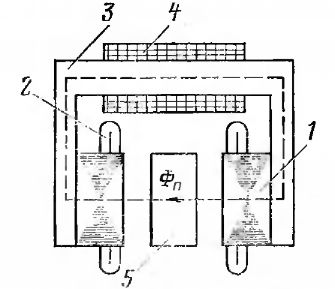
Рис. 14. Линейный синхронный двигатель с униполярным возбуждением.
На рис. 14 показана конструктивная схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создается с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создает постоянный по направлению магнитный поток Фп, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в. путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.