Рабочие органы ряда механизмов при выполнении ими производственных операций должны перемещаться дискретно, шагами. К таким механизмам относятся киносъемочная и проекционная аппаратура, приборы времени, механизмы подач различных станков, устройства перемещения валков прокатных станов и многие другие. Для привода этих рабочих органов целесообразно, очевидно, применять двигатель, способный по своему принципу действия обеспечить подобное дискретное движение. Таким двигателем является шаговый двигатель, ротор которого совершает шаговые перемещения определенной величины с фиксацией положения ротора в конце каждого шага.
Широкое распространение шагового электропривода определяется еще и тем обстоятельством, что он хорошо сочетается с цифровыми вычислительными машинами, программными устройствами и различными цифровыми управляющими приборами, которые все шире применяются во многих отраслях техники.
Современный шаговый двигатель по принципу действия является синхронным двигателем, магнитное поле которого перемещается (вращается) в воздушном зазоре не непрерывно, а дискретно, шагами. Это достигается тем, что обмотки статора питаются от специального источника импульсов напряжения, которые подаются на обмотке статора в определенной последовательности.
Принцип получения дискретного перемещения ротора рассмотрим на примере простейшей схемы двухфазного шагового двигателя, изображенной на рис. 1. Отметим, что под числом фаз шагового двигателя понимается количество каналов, по которым двигатель получает напряжение от источника питания. В схеме рис. 1 таких каналов два.
Двигатель имеет на статоре две пары явно выраженных полюсов, на которых находится обмотка возбуждения (управления) — первая I с выводами 1Н — 1К, и вторая II с выводами 2Н — 2К. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах двигателя. Эти части (полуобмотки) соединены между собой таким образом, что при подаче напряжения на обмотку образуется магнитное поле с полюсами N—S, а при изменении полярности напряжения изменяется на противоположную и полярность магнитных полюсов.
Питание обмоток двигателя осуществляется, как правило, импульсами напряжения прямоугольной формы, поступающими с выхода специального коммутатора напряжения. Коммутатор обычно получает питание в виде напряжения постоянного тока Uu, преобразует его в импульсы напряжения, частота и последовательность которых задается импульсным сигналом управления, и подает их на обмотки двигателя. Коммутатор и шаговый двигатель образуют основную часть шагового привода. Ротор двигателя в рассматриваемой схеме представляет собой двухполюсный постоянный магнит.

Рис. 1. Принцип работы шагового двигателя.
Предположим, что в начальный момент работы шагового двигателя (рис. 1, а) подано напряжение на обмотку I. Протекание тока по этой обмотке вызовет появление магнитного, поля статора с вертикально расположенными полюсами N — S. В результате взаимодействия этого поля с постоянным магнитом ротора последний займет указанное на рисунке положение, в котором оси магнитных полей статора и ротора совпадают и ротор находится в положении устойчивого равновесия. Отметим при этом, что отклонение оси магнитного поля статора или ротора от этого положения вызовет в соответствии с формулой (2) появление синхронизирующего момента, стремящегося вернуть ротор в равновесное положение.
Допустим теперь, что с помощью коммутатора напряжение снято с обмотки I управления и подано на обмотку II с указанной полярностью. Протекание тока по обмотке II приведет к образованию магнитного поля статора уже с горизонтальными полюсами N — S (рис. 1, б). Другими словами, отключение обмотки I и подключение обмотки II вызовут дискретное скачкообразное перемещение оси магнитного поля статора на четверть окружности.
При повороте магнитного поля статора между осями полей статора и ротора появится угол рассогласования и на ротор в соответствии с формулой (2) начнет действовать синхронизирующий момент, стремящийся переместить ротор в новое положение равновесия. Это новое положение ротора будет соответствовать его повороту на четверть окружности (изображено сплошной линией на рис. 1, б). Таким образом, после переключения обмоток ротор совершил шаговое перемещение на четверть окружности вслед за поворотом магнитного поля статора, причем новое положение ротора также является фиксированным и устойчивым.
Предположим далее, что отключилась обмотка II и вновь подано напряжение на обмотку I, однако уже противоположной полярности. Магнитное поле статора при этом (рис. 1, в) вновь дискретно повернется на четверть окружности, но будет иметь уже противоположную приведенной на рис. 1, а полярность полюсов. Вновь на ротор будет действовать синхронизирующий момент, который повернет его в положение, изображенное на рис. 1, в. Следующий шаг в том же направлении ротор может совершить, если будет отключена обмотка I и подключена обмотка II с обратной полярностью напряжения. И, наконец, ротор завершит полный оборот при снятии напряжения с обмотки II и подаче напряжения на обмотку I с полярностью, указанной на рис. 1, а.
Рассмотренный способ коммутации обмоток двигателя, который обеспечивает шаговое перемещение на угол 90°, не является для схемы на рис. 1, а единственно возможным. Существует другой способ, который позволяет при той же конструкции двигателя уменьшить шаг ротора вдвое. Рассмотрим этот способ коммутации.
Допустим, что исходное положение двигателя соответствует схеме рис. 1, а. Подключим теперь обмотку II с полярностью, соответствующей магнитному полю на рис. 1, б, не отключая в то же время обмотку I. При этом образуется вторая — горизонтальная система полюсов, магнитное поле двигателя будет представлять собой результат сложения магнитных полей двух пар полюсов и ось результирующего поля будет располагаться посередине полюсов с одинаковой полярностью, как это и показано на рис. 1, г. Поэтому ротор после подключения обмотки II повернется только на угол 45° (рис. 1, г), а не на угол 90°.
Для совершения следующего шага в 45е достаточно лишь снять напряжение с обмотки L В этом случае магнитное поле двигателя будет соответствовать изображенному на рис. 1, б и ось магнитного потока статора расположится уже горизонтально. Следующий шаг совершится при подключении обмотки I на противоположную полярность напряжения без отключения обмотки II и т. д. Такая схема коммутации, при которой подключаются поочередно одна или две обмотки, является примером так называемой несимметричной схемы коммутации в отличие от рассмотренной вначале симметричной схемы.
В общем случае угловой шаг рассмотренного двигателя а определяется следующей формулой:

где р— число пар полюсов двигателя; п — количество подключений (тактов) в цикле, равное числу фаз при симметричной коммутации и удвоенному числу фаз при несимметричной коммутации.
Для рассмотренного примера р = 2, п = 2 для первой схемы коммутации и п — 4 для второй схемы, соответственно

Шаговый двигатель легко позволяет реверсировать (изменять на противоположное) направление своего движения при любом положении ротора. Для реверса двигателя, например, при симметричной схеме коммутации достаточно включить на обратную полярность напряжения обмотку, которая была отключена на данном такте коммутации. Ротор двигателя при этом совершит шаг в противоположном направлении.
Выше уже говорилось о том, что. управляющим сигналом для шагового привода является, как правило, маломощный импульсный сигнал, поступающий на вход шагового привода от цифрового управляющего прибора или программного устройства. При нормальной работе шагового двигателя каждому импульсу управления строго соответствует шаг двигателя, причем это соотношение выполняется как в установившемся, так и в переходных режимах работы двигателя.
Установившийся режим работы двигателя соответствует постоянной частоте управляющих импульсов, при этом средняя частота вращения ротора пропорциональна этой частоте. Движение ротора в установившемся режиме может иметь монотонный или колебательный характер в зависимости от сочетания параметров двигателя, нагрузки и. частоты управляющего сигнала.
К переходным режимам двигателя относятся его пуск, реверс, торможение и переход с одной частоты управляющих импульсов на другую. Пуск двигателя осуществляется скачкообразным (или постепенным) увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением частоты до нуля, а реверс — изменением последовательности коммутации обмоток двигателя.
Переходные режимы являются для шагового двигателя наиболее сложными, так как вследствие электромагнитной инерции обмоток двигателя, механической инерции его ротора и наличия момента нагрузки на валу ротор двигателя может не успеть отработать полностью все импульсы, поступившие на вход шагового привода. Та максимальная частота управляющих импульсов, при которой возможен пуск двигателя из неподвижного состояния без выпадения из синхронизма (пропуск шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция двигателя, чем больше момент его нагрузки, тем частота приемистости меньше. С другой стороны, увеличение максимального значения синхронизирующего момента двигателя и уменьшение углового шага позволяют повысить верхний предел частоты приемистости.
Современные шаговые двигатели имеют многообразные конструктивные исполнения. Основная их классификация производится чаще всего в зависимости от числа фаз двигателя и устройства магнитной системы. Шаговые двигатели бывают однофазными, двухфазными и многофазными и могут иметь активный или пассивный ротор. Рассмотрим основные типы шаговых двигателей и их количественные характеристики и параметры.
Шаговые двигатели с активным ротором имеют ротор, выполненный из постоянных магнитов или снабженный обмоткой возбуждения, как у обычных синхронных двигателей. Широкое распространение получили вследствие своей высокой экономичности и надежности в работе, технологичности изготовления, небольших габаритов и веса двигатели с ротором из постоянных магнитов. Этот тип двигателя и приведен в качестве примера на рис. 1. Обычно шаговые двигатели с активным ротором имеют относительно крупный шаг ротора — от 90 до 15°, что связано главным образом с трудностями изготовления активного ротора с малыми полюсными делениями. Уменьшение шага в таких двигателях может достигаться увеличением числа фаз и тактов коммутации, а также применением двухстаторной или двухроторной конструкции двигателя.
Максимальные частоты вращения шаговых двигателей этого типа составляют 2000—3000 об/мин, а их частота приемистости лежит в пределах от 70 до 500 Гц.
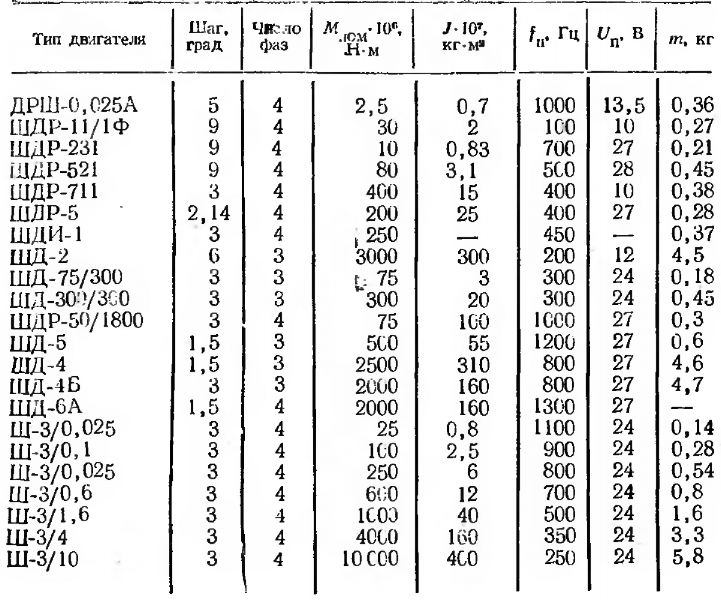
Отечественной промышленностью выпускается несколько серий таких шаговых двигателей: четырехфазные типа ШДА, двух- и четырехфазные типа ДШ и ДША соответственно, трехфазные типа ШДА-3 и ряд других. Некоторые технические данные этих двигателей приведены в табл. 10, где fn — частота приемистости двигателя при номинальной нагрузке, a Un — напряжение постоянного тока источника питания.
Таблица 2

|
|
|
|
|
|
|
|
ДИР-1Б | 3,6 | 4 | 400 |
| 80 | 27 | 0,16 |
ДШ-0.025А | 22,5 | 4 | 25 | 2,5 | 450 | 27 | |
ДШ-0.04А | 22,5 | 4 | 40 | 3,5 | 450 | 27 | |
ДШ-0,1А | 22,5 | 4 | 100 | 19 | 300 | 27 | 0,5 0,9 1,6 |
ДШ-0.25А | 22,5 | 4 | 250 | 58 | 250 | 27 | |
ДШ-0.4А | 22,5 | 4 | 400 | 125 | 200 | 27 | |
ДШ-1А | 22,5 | 4 | 1000 | 420 | 150 | 27 | 3,0 |
ЦШ-4А | 18 | 4 | 4000 | 1370 | 100 | 27 | 8,1 |
ДШ-6А | 18 | 4 | 6000 | 2300 | 80 | 27 | 11,5 |
ДШ-10А | 18 | 4 | 10000 | 4200 | 70 | 27 | 14,8 |
ШДА-1А | 22,5 | 4 | 40 | 3 | 50 | 14 28 | 0,12 |
ШДА-1Ф-К | 22,5 | 4 | 30 | 3 | 50 | 0,14 | |
ЩДА-2А | 22,5 | 4 | 110 | 6,8 | 50 | 14 | 0,21 |
ШДА-2Ф -К | 22,5 | 4 | 60 | 6,8 | 125 | 0,23 | |
ШДА-ЗА | 22,5 | 4 | 280 | 20 | 32 | 14 | 0,35 |
ШДА-ЗФ | 22,5 | 4 | 120 | 20 | 100 | 0,35 | |
ШДА-4А | 22,5 | 4 | 600 | 28 | 50 | 14 | 0,55 |
ЩДА-5А | 22,5 | 4 | 1000 | 48 | 50 | 14 | 0,8 |
ШДА-6А | 22,5 | 4 | 1600 | 97 | 50 | 14 | 1.1 |
ШДМ-2Ф | 22,5 | 4 | 100 | 1,7 | 220 | 27 | 0,32 1,65 |
ШДМ-7Ф | 22,5 | 4 | 1600 | 80 | 60 | 27 | |
ШД- 10I 10О | 15 | 4 | 10 | 5 | 100 | 14 | 0,08 |
ШД-1С | 15 | 4 | 40 | 14 | 100 | 27 | 0,14 |
ШД-1Б | 15 |
| 40 | 14 | 200 | 25 | 0.12Е |
ШД-1ЕМ | 15 | 4 | 40 | 3 | 250 | 14 | 0.20 |
ШД-1А | 15 |
| 120 | 45 | 150 | 25 | 0,46 |
ШД-ЗС | 15 | 4 | 250 | 100 | 100 | 24 | 0,6 |
ЦЩА-2-1 | 15 | 2 | 10 |
| 400 | 27 | 0,14 |
ШДА-2-2 | 15 | 2 | 40 |
| 350 | 27 | 0,28 |
ШДА-2-3 | 15 | 2 | 100 |
| 320 | 27 | 0,55 |
ЩДА-2-4 | 15 | 2 | 400 |
| 300 | 27 | 1,0 |
ШДА-2-5 | 15 | 2 | 600 |
| 250 | 27 | 2,0 |
ШДА-2-6 | 18 | 2 | 1000 |
| 200 | 27 | 3,15 |
ШДА-3-1 | 15 | 3 | 10 |
| 500 | 27 | 0,14 |
ШДА-3-2 | 15 | 3 | 40 |
| 450 | 27 | 0,28 |
ШДА-3-3 | 15 | 3 | 100 | — | 350 | 27 | 0,55 |
ШДА-3-4 | 15 | 3 | 400 |
| 150 | 27 | 1,0 |
ШДА-З-Б | 15 | 3 | 600 |
| 150 | 27 | 2,0 |
ШДА-3-6 | 15 | 3 | 1000 | — | 100 | 27 | 3,5 |
Ш-22,5/0,1 | 22,5 | 4 | 100 | 0,4 | 500 | 48 | 0.49 |
Ш-22,5/0,25 | 22,5 | 4 | 250 | 1,7 | 500 | 48 | 0,67 |
Ш-22,5/0,6 | 22,5 | 4 | 600 | 15 | 350 | 48 | 1,7 |
Ш-22,5/1,6 | 22,5 | 4 | 1600 | 68 | 250 | 48 | 3.0 |
Ш-22,5/4 | 22,5 | 4 | 4000 | 210 | 240 | 48 | 4,2 |
Ш-22.5/10 | 22,5 | 4 | 10000 | 710 | 120 | 48 | 10,0 |
Ротор шагового двигателя с постоянными магнитами изготовляется обычно из сплавов ЮН15ДК25БА или ЮНДК35Т5 в виде «звездочек», как это показано на рис. 2. При этом ротор может быть или монолитным (рис. 2, а), или составным (рис. 2, б). Во втором случае магниты устанавливаются на специальную втулку или непосредственно на вал, которые выполняются из магнитомягкого материала.
Для этих двигателей практическое применение нашла также двухпакетная конструкция. Она предусматривает размещение в одном корпусе двигателя двух сердечников статора и двух «звездочек» ротора. Оси полюсов обоих роторов совпадают, а полюсы сердечников статора сдвинуты относительно друг друга на половину одного зубцового деления, чем достигается пространственный сдвиг магнитных полей статорных обмоток. Такая конструкция, позволяющая уменьшить шаг ротора и увеличить быстродействие двигателя, является целесообразной при создании мощных (силовых) шаговых двигателей.
Желание уменьшить электромагнитную и механическую инерцию шаговых двигателей, что позволяет улучшить их динамические характеристики, привело к созданию двигателей с малоинерционными роторами — полыми цилиндрическими и дисковыми, имеющими на роторе печатную обмотку. По конструкции эти двигатели аналогичны двигателям непрерывного вращения и обладают такими же отличительными свойствами. Одна из конструктивных схем шагового двигателя этого типа приведена на рис. 3. Печатная обмотка управления находится на полом цилиндрическом роторе 1 (такая конструкция двигателя часто называется обращенной). Токоподвод к роторной обмотке осуществляется через контактные кольца 2, укрепленные на валу двигателя. Полый ротор находится в зазоре между внешним статором 3, на котором располагается обмотка возбуждения 4, и внутренним статором 5, который является частью магнитопровода.

Рис. 2. Ротор шагового двигателя.
а — монолитный; б — составной.

Рис. 3. Малоинерционный шаговый двигатель.
Практическое распространение получила также конструкция шагового двигателя с дисковым (торцевым) ротором с печатными обмотками.
Шаговые двигатели с пассивным ротором. Специфической особенностью шаговых двигателей с активным ротором является, как уже отмечалось выше, относительно большой шаг ротора. Это требует в большинстве случаев применения механических передач (редукторов), понижающих (редуцирующих) шаг и соответственно скорость входного вала производственного механизма, что усложняет шаговый привод, снижает его надежность, повышает массу, габариты и уровень шума. Стремление найти конструкцию шагового двигателя с небольшим шагом ротора привело к появлению двигателей с пассивным ротором. Эти двигатели делятся на реактивные и индукторные.

Рис. 4. Принцип работы реактивного шагового двигателя.
Рассмотрим вначале работу реактивного шагового двигателя, одна из возможных конструктивных схем которого показана на рис. 4,а.
Статор и ротор двигателя, набранные из листов электротехнической стали, имеют явно выраженные полюсы, которые в теории шагового привода принято обычно называть зубцами. На зубцах статора располагаются обмотки, которые, как обычно, получают питание от коммутатора напряжения. Ротор двигателя, выполненный из ферромагнитного материала, не имеет обмотки возбуждения, в силу чего он и получил название пассивного.
Отличительной особенностью конструкции реактивного двигателя является неравенство количества зубцов статора Zc и ротора Zp, причем обычно ротор имеет больше зубцов, чем статор. Так, изображенный на рис. 4,а Двигатель имеет 6 зубцов на статоре и 8 зубцов на роторе. При этом важно отметить, что зубцы ротора соосны с зубцами одной пары диаметрально противоположных зубцов статора.
Предположим теперь, что в исходном положении, соответствующем приведенному на рис. 4,а, подано напряжение на обмотку управления пары полюсов 1—1 статора и образовалось магнитное поле с полюсами N—S. Тогда при изображенном на рис. 4,а положении ротора, при котором ось намагниченных зубцов статора /—/ совпадает с осью зубцов ротора 1—1, последний находится в положении устойчивого равновесия, поскольку магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются.
Снимем теперь напряжение с первой обмотки и подадим на вторую. Это переключение вызовет намагничивание зубцов статора II—II и поворот оси магнитного 360° поля на угол g— =60°, как это показано на рис. 4,6.
Ось магнитного поля уже не совпадает ни с одной осью зубцов ротора, силовые линии магнитного поля деформируются, и на ротор начинает действовать синхронизирующий момент, стремящийся повернуть его в согласованное равновесное положение по кратчайшему пути. Это новое равновесное положение будет соответствовать изображенному на рис. 4,6, когда ось зубцов ротора 2—2 будет совпадать с осью зубцов статора //—II.
При следующем переключении обмоток — отключении второй и подключении третьей обмотки — намагнитятся зубцы статора III—III и ротор вновь повернется уже до совпадения оси зубцов ротора 3—3 с осью зубцов статора III—III.
Из рис. 4,а нетрудно определить, что при каждом переключении обмоток статора ротор совершает поворот (шаг) на угол ар, равный:

Р В общем виде эта формула имеет вид:

где Тс, тр — соответственно полюсные деления статора и ротора.
Уменьшая разность чисел зубцов Zc и Zp, можно снижать шаг ротора до весьма малых значений. Практически разность Zp—Zc выбирают обязательно четной, что улучшает использование двигателя.
Одновременно с уменьшением углового шага ротора снижается и частота его вращения. Действительно, если
360°
поле статора поворачивается на угол , а ротор
360* (Zp — Zc)
за то же время на угол а — —7 , то частота вращения ротора п. будет меньше частоты вращения статора, для рассмотренного примера это отношение будет равно

Более распространенная конструкция реактивного шагового двигателя показана на рис. 4,в. Каждый полюс статора имеет три зубца, такие же зубцы расположены по всей поверхности ротора. Зубцы ротора соосны, как и в конструкции рис. 4,а, с зубцами статора одной диаметрально противоположной пары и смещены относительно зубцов двух других пар на треть зубцового деления. В этом случае при переключении обмоток статора ротор будет поворачиваться на 1/3 зубцового деления до совпадения зубцов ротора с зубцами вновь возбужденной пары полюсов статора.
При изготовлении ротора с большим числом зубцов Zр можно получить небольшое зубцовое деление ротора и соответственно малый шаг ротора, составляющий в реальных конструкциях доли градуса. В общем случае смещение осей зубцов ротора и статора производится на угол S6G°/mZp, а единичный шаг ротора составляет:

где п — количество тактов в цикле; т — число фаз.
Реактивные шаговые двигатели при всей своей простоте и технологичности конструкции, малых значениях шага и частоты вращения ротора обладают одним существенным недостатком: синхронизирующий момент
этих двигателей, а тем самым и их мощность невелики, что ограничивает области их применения
Этого недостатка в значительной мере лишены индукторные шаговые двигатели, в которых для увеличения синхронизирующего момента используется дополнительное подмагничивание ротора постоянным магнитным потоком со стороны статора. Одна из конструктивных схем двигателя этого типа изображена на рис. 5.
Особенность двигателя заключается в наличии кольцевого постоянного магнита I, расположенного на одном из торцов двигателя. Этот магнит создает постоянный по направлению магнитный поток, который, проходя в осевом направлении по ротору и в радиальном направлении через воздушный зазор, имеет вследствие зубчатой поверхности ротора 2 более высокое значение индукции в зубцах ротора, нежели во впадинах. Другими словами, силовые линии постоянного магнита N—S концентрируются в зубцах ротора и поэтому эти зубцы можно рассматривать как своего рода полюсы постоянного магнита. Индукторные двигатели имеют по сравнению с реактивными повышенный синхронизирующий момент и улучшенные энергетические и динамические свойства, занимая по этим показателям среднее положение между двигателями с активным и реактивным роторами.
Помимо возбуждения от постоянных магнитов, индукторные шаговые двигатели могут иметь независимое электромагнитное возбуждение или выполняться с самовозбуждением.
Отечественная электропромышленность выпускает несколько серий шаговых двигателей с пассивным ротором. Технические данные некоторых из них приведены в табл. 3.
Как видно из приведенных таблиц, шаговые двигатели с пассивным ротором имеют по сравнению с двигателями с активным ротором более мелкий единичный шаг и большую частоту приемистости.

Рис. 5. Индукторный шаговый двигатель.
Развитие шагового электропривода и его широкое распространение привели к созданию специальных видов шаговых двигателей — линейных, волновых и с катящимся ротором.
Таблица 3
Эти двигатели имеют те же специфические особенности, что и рассмотренные ниже двигатели непрерывного вращательного движения, отличаясь от них дискретностью перемещения ротора.
Двигатель с катящимся (эксцентрическим) ротором имеет тот же принцип действия, что и синхронный двигатель с катящимся ротором, но отличается от него фиксированным значением эксцентриситета ротора. К достоинствам шаговых двигателей с эксцентрическим ротором относится возможность получения весьма малых значений шага и низких частот вращения при значительном моменте и малой инерционности. При этом двигатели характеризуются небольшой массой и относительно высокими энергетическими показателями работы.
Примерно такими же показателями обладают шаговые двигатели с гибкими волновыми передачами. Такие передачи имеют незначительный люфт и высокий коэффициент полезного действия, что позволяет применить их в весьма точных устройствах.
Для получения линейных дискретных перемещений рабочих органов применяются линейные шаговые двигатели.