Снижение частоты при отключении подстанций в цикле АПВ и АВР. Блокировка АЧР
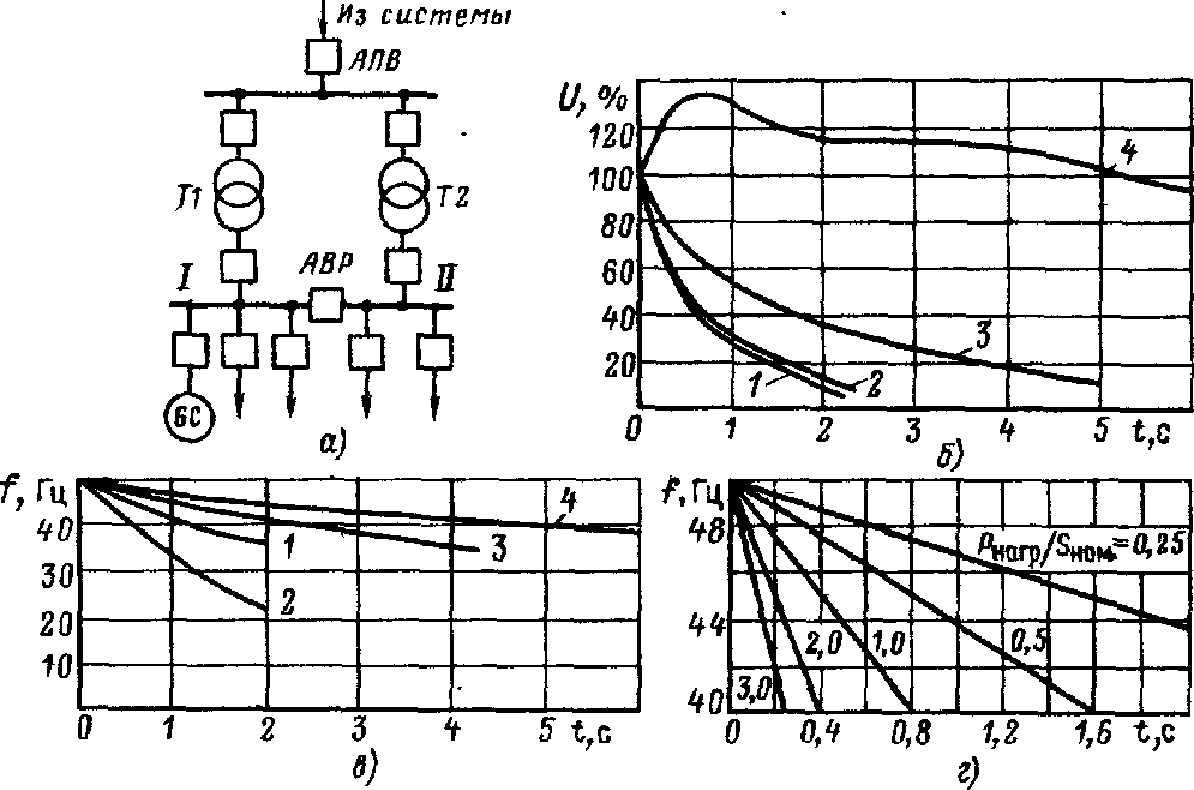
Рис. 8.2. Снижение частоты и напряжения на выбеге двигателей: а—схема подстанции; б—кривые снижения напряжения на выбеге двигателей е различными приводимыми механизмами после их отключения от сети (экспериментальные данные); в—кривые снижения частоты в тех же условиях; 7— асинхронный двигатель, приводимый механизм — вентилятор 380 кВт, 980 об/мин к =0,63, т = 3,3 с; 2—асинхронный двигатель, приводимый механизм—мельница 625 кВт, 735 об/мин, к,=0,65, т, = 1,9с; 3—асинхронный двигатель, приводимый механизм—питательный насос 2000 кВт, 2975 об/мин, к,=0,48, т,= 5 с; 4—синхронный двигатель 1080 кВт, приводимый механизм—вентилятор (повышение напряжения в начале процесса произошло из-за того, что двигатель до отключения работал с перевозбуждением); г—изменение частоты на зажимах синхронного компенсатора (расчет)
Снижение частоты в отдельных узлах энергосистемы может происходить не только при местных или общесистемных дефицитах мощности, но и при временном отключении подстанций с двигателями или синхронными компенсаторами в циклах АПВ и АВР. Если, например, питание потребителей на подстанции (рис. 8.2, а) из-за отключения связи с энергосистемой или трансформатора Т1 теряется, оно может быть через некоторое время восстановлено действием АПВ линии, трансформатора или АВР секционного выключателя. Однако во время паузы, пока питающая линия или трансформатор отключены, напряжение на шинах подстанции исчезает не сразу, а некоторое время поддерживается вращающимися по инерции синхронными компенсаторами и двигателями. В то же время частота в этом узле начинает снижаться, поскольку эти агрегаты постепенно начинают затормаживаться. Вследствие этого за время паузы потребители, питающиеся от шин подстанции, могут быть отключены в результате излишнего действия АЧР.
Изменение частоты на шинах подстанции после ее отключения определяется значением отделившейся нагрузки и постоянными механической инерции компенсаторов, двигателей и приводимых механизмов.
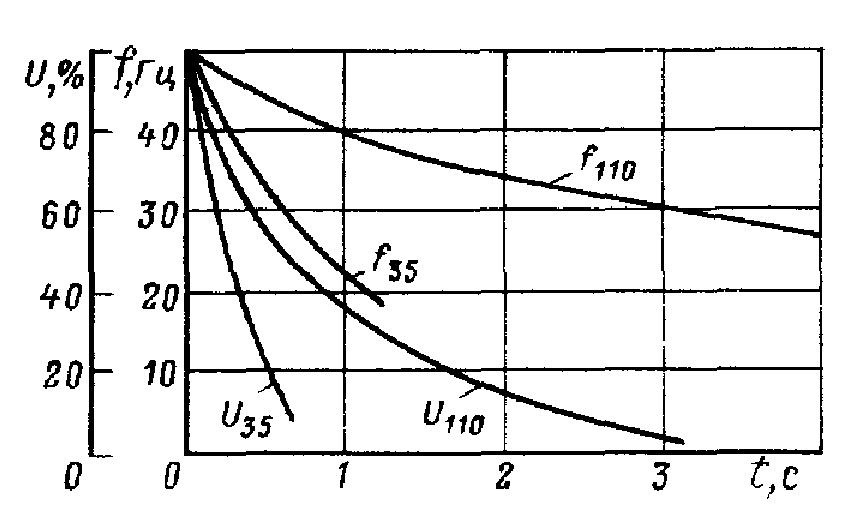
Рис. 8.3. Изменение частоты и напряжения на шинах подстанций 110 и 35 кВ с комплексной нагрузкой после их отключения от энергосистемы

Рис. 8.4. Зависимость скорости изменения частоты на выбеге двигателей или синхронных компенсаторов от механической постоянной инерции и коэффициента загрузки:
1—к,= 1; 2— к, = 0,7; 3—к,=0,5
Асинхронные двигатели могут поддерживать напряжение на шинах подстанции выше (0,4-0,5) Нном в течение времени до 1 с, а синхронные двигатели и компенсаторы могут поддерживать напряжение на таком уровне в течение нескольких секунд.
Как показывают расчеты и эксперименты, с достаточной точностью в диапазоне снижения частоты вращения двигателей до 0,8—0,9 номинальной их движение можно считать равномерно замедленным, т. е. зависимость изменения частоты вращения двигателя (частоты, Гц) во времени при прекращении его питания можно считать линейной и определять по формуле
![]() (8.5)
(8.5)
где к= Р/Рном— коэффициент загрузки двигателя; тдв— постоянная механической инерции двигателя и приводимого механизма.
На рис. 8.2,6 в качестве примера приведены зависимости изменения частоты и напряжения на выбеге асинхронных и синхронного двигателей, приводящих во вращение различные механизмы, после их отключения от сети.
Изменение частоты на зажимах синхронного компенсатора после отключения питающей линии также может быть приближенно рассчитано по (8.5). Здесь к3 = Рн/Sном, где Рп—суммарная мощность нагрузки, оставшейся подключенной к синхронному компенсатору, и активных потерь в узле; SН0М—номинальная мощность компенсатора. На рис. 8.2, г построены рассчитанные по (8.5) зависимости f= φ (0 для синхронного компенсатора с t = 4c при прекращении его питания. Отметим также, что на характер изменения напряжения на выбеге крупных синхронных двигателей и синхронных компенсаторов существенное влияние оказывают режим их работы до отключения (рис. 8.2, в) и действие АРВ (если они установлены), способствующее поддержанию напряжения на его зажимах при прекращении питания.
При наличии на временно обесточившейся подстанции комплексной нагрузки, включающей в себя безынерционную нагрузку (освещение и т. д.), синхронные компенсаторы, различные виды двигателей и приводимых механизмов, отличающихся загрузкой, постоянными механической инерции и другими параметрами, характер изменения частоты и напряжения на шинах подстанции определяется процессом группового выбега подключенных к этим шинам агрегатов, зависит от большого числа факторов и может быть различным (рис. 8.3).
Как видно из рис.8.2, 8.3, на выбеге двигателей и синхронных компенсаторов могут излишне срабатывать быстродействующие очереди АЧР1.
Для предотвращения излишних срабатываний устройств АЧР их выдержка времени должна быть такой, чтобы они не успевали сработать, пока остаточное напряжение не снизится до 10—30% номинального, при котором реле частоты не будет срабатывать. Этим условиям в большинстве случаев удовлетворяют очереди АЧР2, поэтому следует стремиться устанавливать на подстанциях, где возможен выбег двигателей и компенсаторов в паузах АПВ и АВР, устройства этой категории разгрузки. Однако поскольку подстанций, в состав нагрузки которых входят двигатели, большинство и, естественно, на них приходится устанавливать и очереди АЧР1, то этим мероприятием исключить излишнее срабатывание АЧР во многих случаях не удается.
В практике эксплуатации для предотвращения излишних срабатываний АЧР в паузах АПВ и АВР, как правило, применяются специальные блокировки. Такая блокировка может быть выполнена по скорости снижения частоты на шинах обесточившейся подстанции. Используя выражение (8.5), скорость снижения частоты на выбеге двигателя или синхронного компенсатора в начальной стадии этого процесса можно приближенно рассчитать так, Гц/с:
![]() (8.6)
(8.6)
Постоянная механической инерции многих двигателей и приводимых механизмов не превосходит T = 5 —6 с, в этих же пределах находится этот параметр и для СК, коэффициент загрузки двигателей, как правило, составляет к3 = 0,5-:-6. На рис. 8.4 приведены зависимости скорости изменения частоты на выбеге при различных значениях параметров. Сопоставляя эти зависимости с зависимостями рис. 2.21, можно видеть, что в

большинстве случаев скорость снижения частоты на выбеге двигателей и синхронных компенсаторов существенно больше, чем при дефицитах мощности. Только при малых к3 и больших ту скорости снижения частоты на выбеге близки к скорости снижения, частоты при больших дефицитах мощности, которые характерны, как указывалось выше, в основном для случаев местных аварийных ситуаций. Таким образом, можно построить блокировку АЧР, используя существенное различие в скорости снижения частоты на выбеге двигателей и синхронных компенсаторов и при дефицитах мощности. Для ряда приводимых механизмов ту существенно больше (до 30 с). В этом случае блокировку по указанному принципу осуществить не удается.
Рис. 8.5. Схема блокировки устройства АЧР по скорости снижения частоты
Первые предложения по использованию фактора скорости снижения частоты для целей блокировки излишнего действия АЧР были сделаны в [3]. Для этой цели было рекомендовано использовать схему с двумя реле частоты и реле времени. Позже во ВНИИЭ было разработано более совершенное устройство блокировки (33 J, которое нашло широкое применение в энергосистемах. Его принципиальная схема приведена на рис. 8.5.
Блокировка выполняется с помощью реле частоты KF1, реле времени КТ1 и промежуточного реле KL1, включенного через резистор R. Уставка по частоте реле KF1 блокировки выше, чем уставка реле частоты KF2 устройства АЧР, и при снижении частоты сначала срабатывает реле KF1, а потом реле KF2.
При общесистемном дефиците мощности, когда скорость снижения частоты относительно невелика, реле времени КТ1 успевает замкнуть свой контакт в цепи обмотки реле KLI, последнее своим замкнувшимся контактом KL1.2 подготавливает цепь обмотки реле времени КТ2 устройства АЧР. После срабатывания реле KF2 и KL2 устройства АЧР замыкается контакт KL2.2, срабатывает реле времени КТ2, а затем промежуточное реле KL3, замыкающиеся контакты которого дают команду на отключение соответствующих присоединений.
При большой скорости снижения частоты, характерной для режима выбега двигателей или синхронного компенсатора при обесточении подстанций, реле KF2 срабатывает вслед за реле. KF1 до того, как замкнется контакт реле КТ1. Сработавшее промежуточное реле KL2 своим контактом KL2.1 через еще не разомкнувшийся размыкающий контакт реле KL1.1 подает «плюс» оперативного тока на правый зажим обмотки реле KLI, запрещая срабатывание этого реле (и замыкание его контакта KL1.2) после замыкания контакта реле времени КТ1. Тем самым действие устройства АЧР блокируется. При использовании в качестве реле KF2 полупроводникового реле РЧ-1 из схемы можно исключить специальное реле времени КТ2.
Необходимая выдержка времени устройства блокировки может быть определена следующим образом:
![]() (8-7)
(8-7)
где f6л—уставка по частоте блокирующего устройства; fАЧР— уставка по частоте устройства АЧР (или наивысшая уставка по частоте, если устройство блокировки выполнено на несколько очередей АЧР); tзan — время запаса (ориентировочно 0,2—0,3 с).
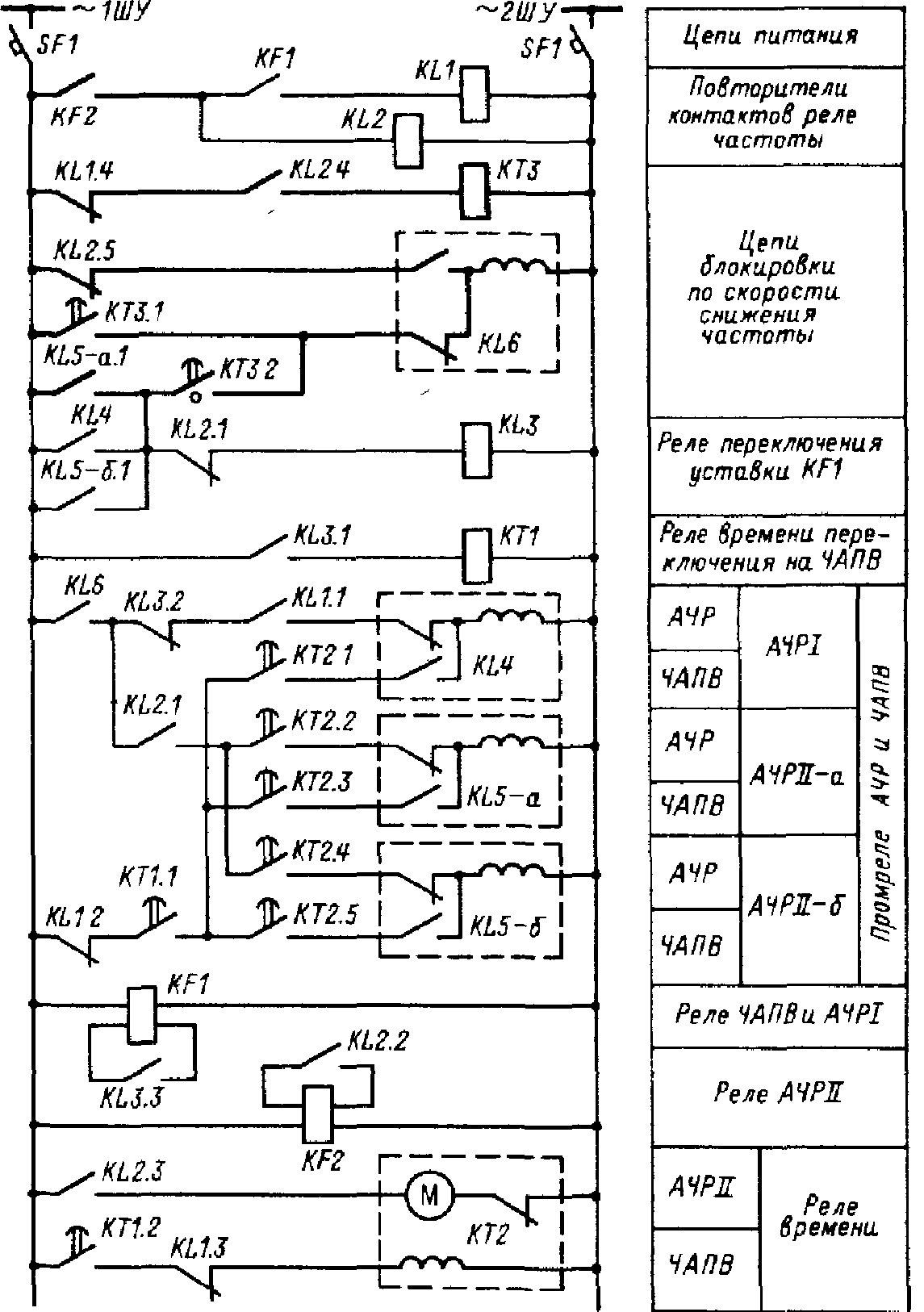
Рис. 8.6. Схема АЧР с блокировкой по скорости снижения частоты (цепи блокировки выделены утолщенными линиями)
Блокировка по скорости снижения частоты в принципе может быть выполнена во многих схемах АЧР, использующих для очередей АЧР2 и АЧР1 два реле частоты или одно реле с перестройкой уставки. Так, например, если в схеме АЧР Челябэнерго (см. рис. 6.13) на проскальзывающем контакте реле времени КТ1.3 выполнить выдержку времени меньшую, чем время снижения частоты от уставки АЧРП до уставки
АЧР1 при максимально возможном дефиците мощности, то замыкание контакта КТ1.3 при замкнувшемся реле KF (уставка АЧР1) приведет к блокировке схемы.
Блокировка по скорости снижения частоты может быть выполнена и в типовой схеме Энергосетьпроекта для АЧР с двумя реле частоты. Вариант схемы АЧР с устройством блокировки показан на рис. 8.6. Время снижения частоты от уставки fАЧР2 (реле KF2) до fАЧР1 (реле KF1) контролируется с помощью реле КТЗ, блокировка выполняется на двухпозиционном реле KL6. При снижении частоты на выбеге двигателей или СК реле KL1 срабатывает после KL2, реле КТЗ не успевает переключить KL6, в результате этого схема разгрузки заблокирована. При более медленном снижении частоты в результате возникновения дефицита мощности реле КТЗ успевает сработать и переключить реле KL6, которое разрешает действие разгрузки. Возможно такое протекание процесса, когда в процессе снижения частоты сработает только одна очередь разгрузки (АЧРП), после этого частота поднимется выше уставки АЧРП и реле KF1 переключится на уставку ЧАПВ. Чтобы блокировка работала правильно при повторном снижении частоты, выдержка времени на проскальзывающем контакте КТ3.2 делается меньше, чем на контакте КТ3.1, на значение длительности возврата KL3, КТ1 и переключения KF1 с уставками ЧАПВ на АЧР1. Тогда реле блокировки KL6 переключится через замкнувшийся контакт выходного реле любой из очередей АЧР и проскальзывающий контакт КТ3.2.
Для целей блокировки действия устройств АЧР могут быть использованы и другие факторы. Например, последовательно с контактом реле частоты KF устройства АЧР может быть включен контакт блокирующего реле направления мощности KW в линии или трансформаторе. Нормально мощность направлена из энергосистемы по питающей линии и понижающему трансформатору к шинам, от которых питается нагрузка. При общесистемном снижении частоты направление мощности остается неизменным, контакты реле мощности остаются замкнутыми, тем самым разрешается срабатывание устройств АЧР. При отключении питающей линии или трансформатора мощность меняет свое направление (она направлена от синхронных двигателей к нагрузке, подключенной к питающей линии или к обмотке среднего напряжения трансформатора) или становится равной нулю (если синхронные двигатели питают нагрузку, подключенную к их шинам). В этом случае реле мощности разомкнет свои контакты, тем самым запрещая действие устройств АЧР.
Блокировка по такому принципу неэффективна, если по отключаемой линии или трансформатору питается несколько узлов нагрузки с синхронными двигателями. В этом случае из-за взаимных колебаний активной мощности между этими узлами, а также подпитки одного узла от другого при переходе части синхронных двигателей в генераторный режим блокировка по изменению направления мощности может не срабатывать.
Аналогичным образом могут быть выполнены и блокировки по другим факторам (по исчезновению тока в питающей линии или трансформаторе и т. д.).
Возможно выполнение блокировки АЧР по уровню частоты на соседней секции шин данной подстанции. Так, если в схеме на рис. 8.7 вместо контакта реле направления мощности ввести контакт второго реле частоты, включенного на напряжение другой секции шин этой подстанции, то при общесистемном снижении частоты, когда оба реле замкнут свои контакты, АЧР сработает. Если же, например, произойдет отключение трансформатора 77 (рис. 8.2, а) с его последующим АПВ, то АЧР на секции шин I будет заблокирована, так как на секции шин II частота при этом снижаться не будет. Выполнение блокировки по такому принципу, как правило, целесообразно там, где питание различных групп нагрузок осуществляется по различным линиям. Так, в схеме на рис. 8.2, а при отключении линии связи с системой с ее последующим АПВ будет иметь место одновременное снижение частоты на секциях шин I и II, в результате чего блокировка по такому принципу окажется неэффективной. Если бы нагрузка секции шин II питалась по отдельной линии, то такая блокировка позволила бы исключить излишние действия АЧР при отключениях каждой из питающих линяй.