ИСПОЛЬЗОВАНИЕ ПОСТОЯННЫХ МАГНИТОВ ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК АКСИАЛЬНЫХ ИНДУКТОРНЫХ МАШИН
Ю. Н. КРОНЕБЕРГ, канд. техн. наук
Аксиальные индукторные (пульсационные) машины (АИМ) чаще всего применяются в качестве источников питания повышенной частоты с регулируемым (стабилизированным) напряжением [1, 2]. Они просты и надежны (рис. 1, а), однако из-за отсутствия половины полюсных выступов (рис. 1, б) и расположения обмотки возбуждения (ОВ) вне полюсной зоны магнитная индукция воздушного зазора В6 пульсирует, не меняя знака (рис. 1, в), и поэтому полезная э. д. с., пропорциональная первой гармонике индукции Βι, наводится только в половине проводников обмотки якоря, а в остальных пазовые потоки индуктора наводят встречную паразитную э. д. с. В итоге по сравнению с альтернативными (переменно-полюсными) машинами в АИМ объем якоря значительно больше, а наличие осевых магнитопроводов, масса которых достигает 30—60 % общей массы, дополнительно снижает использование машины.
Успехи в разработке постоянных магнитов (ПМ), в частности редкоземельных, открывают новый подход к улучшению удельных показателей АИМ. Подобно тому, как в свое время стала возможной замена обмотанных полюсов радиальными ПМ, так полюсные выступы из современных ПМ в ряде случаев уже могут обеспечить магнитный поток не ниже, чем создает ОВ в зубцах ротора АИМ.

Рис. 1. Общий вид (а), полюсная система (б) и поле воздушного зазора аксиальной (в) индукторной машины
Причем источниками м. д. с. в этом случае являются сами выступы, что заметно улучшает использование магнитного потока, который во впадинах резко снижается и даже может изменить знак. Кроме того, полюсные выступы можно выполнить с разной полярностью, уменьшив тем самым осевой поток.
Однако АИМ, став магнитоэлектрической, теряет важное свойство — регулируемость. Поэтому, например, для источников питания предпочтительнее вариант с комбинированным возбуждением (КВ), когда сохраняется ОВ вместе с частью зубцов и осевыми магнитопроводами уменьшенного сечения. Выбор структурного построения таких машин во многом зависит от числа полюсов 2р, полюсного деления т и требований к регулированию напряжения. Последние достаточно полно характеризуются необходимым диапазоном изменения э. д. с. холостого хода, который удобно оценивать относительной величиной![]()
где В10, В1 — первые гармоники индукции, соответствующие э. д. с. Е0, Е при отключенной ОВ и при ее номинальном токе.
Рассмотрим наиболее рациональные варианты полюсных систем. Когда полюсное деление τ велико (более 20—35 мм) и необходим относительно широкий диапазон регулирования(А=30-:-50 %), лучше всего между зубцами ротора 1 (рис. 2) установить ПМ 2 противоположной полярности, что соответствует одному из вариантов машин КВ альтернативно-пульсационного типа [2, 3].

Рис. 3. Полюсная система альтернативно-пульсационной машины с усиленной магнитоэлектрической частью и поле воздушного зазора при отключенной ОВ (а) и при номинальном токе ОВ (б)

Рис. 2. Полюсная система и поле воздушного зазора альтернативно-пульсационной машины при отключенной О В (а) и при номинальном токе О В (б)

Рис. 4. Полюсная система машины с магнитоэлектрической частью и поле воздушного зазора при отключенной О В (а) и при номинальном токе О В (б)
Их принцип действия ясен из рис. 2, а и б. При мощностях до нескольких десятков киловатт они по удельным характеристикам значительно превосходят АИМ и вполне сопоставимы с любыми бесконтактными машинами, но отличаются простотой конструкции и экономичным регулированием, причем в однопакетных машинах Δ=35-Μ5 в двухпакетных Δ=40-:-55 %.
Такие диапазоны, например для источников питания со стабильной частотой вращения, обычно избыточны, и часть зубцов 1 (рис. 2) можно заменить ПМ 1 той же полярности (рис. 3), сохранив при этом все ПМ 2 противоположной полярности. При отключенной ОВ (рис. 3, а) потоки разноименных ПМ частично замкнутся по спинкам индуктора и якоря, разгружая осевые магнитопроводы, а при номинальном токе ОВ поле примет обычный вид (рис. 3,6).
При меньших τ (15—25 мм) выполнить полюсную систему по рис. 2 или 3 уже затруднительно, но разноименные ПМ еще можно разместить на расстоянии τ. В этом случае окружность индуктора целесообразно разбить (рис. 4) на ряд чередующихся участков двух типов (1, 2) и на первых сосредоточить одноименные зубцы 3, а на вторых — разноименные ПМ 4 и 5. По удельным характеристикам такие машины, принцип действия которых ясен на рис. 4, а. б, занимают промежуточное положение между альтернативными магнитоэлектрическими машинами и АИМ.
В случае еще меньших τ (10—15 мм), когда невыгодно устанавливать полюсные выступы на расстоянии, меньшем 2т, изменением структуры можно добиться только снижения потока и сечения осевых магнитопроводов [5]. Для этого полюсную систему (рис. 5) нужно разбить на участки типа 1 и 2 и сосредоточить на первых зубцы 3 и ПМ 4 одной полярности, а на вторых — ПМ 5 противоположной полярности. Число зубцов 3 должно соответствовать заданному Δ, а число ПМ 4 и 5 выбирается из условия минимизации сечений осевых магнитопроводов. Иными словами, нужно стремиться, чтобы осевые потоки, соответствующие э. д. с. Е0 и Е, были близки по абсолютным значениям, но противоположны по направлению.

Рис. 5. Полюсная система АИМ с разноименными полюсными выступами и поле воздушного зазора при отключенной ОБ (а) и при номинальном токе ОБ (б)
Если удается обеспечить такой реверс потока, то сечения осевых магнитопроводов снижаются до значения, пропорционального Δ/2, компенсируя, часто с избытком, уменьшение общего числа полюсных выступов, обусловленное увеличенным пространственным сдвигом между выступами (до 3τ) на границах участков 1 и 2 (рис. 5). Например, при полюсной системе согласно рис. 5 приведенная масса машины КВ будет на 20—40 % меньше, чем у АИМ.
В случае предельно малых τ (менее 10 мм) выполнять полюсные выступы в виде отдельных брусков из ПМ (рис. 5) нерационально, так как ухудшаются их удельное использование и технологичность. Более приемлем видоизмененный вариант (рис. 6). Подобно показанной на рис. 5, полюсная система разбивается на участки 1 и 2, причем зубцы 3 имеют обычную конструкцию, а все отличие — в магнитоэлектрической части. Ее одноименные полюсные выступы 4 и 5, принадлежащие участкам 1, объединены магнитомягкими гребенками 6 и 7, одноименные выступы 8, принадлежащие участкам 2,— аналогичными гребенками 9. Между гребенками 6,7,9 и ярмом 10 установлены соответствующим образом намагниченные ПМ 11, 12 и 13.
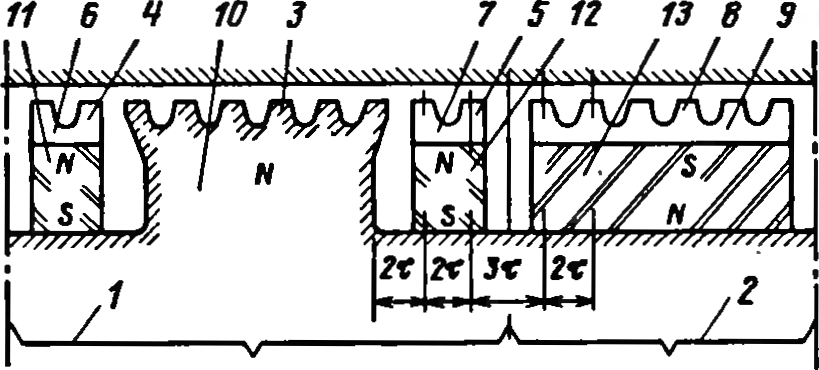
Рис. 6. Полюсная система АИМ с разноименными гребенчатыми полюсными выступами.
Такая конструкция при малых τ технологичнее, обеспечивает хорошую концентрацию магнитных потоков ПМ, но в отличие от представленной на рис. 5 пазы гребенок, как и пазы индукторов обычных АИМ, имеют одинаковый со своими зубцами магнитный потенциал, что ухудшает использование магнитного потока.
Таким образом, анализ вариантов систем КВ показывает, что при наличии ПМ, которые в равном объеме могут обеспечить эквивалентную по полезному магнитному потоку замену зубцов АИМ, имеется возможность, сохраняя необходимый диапазон регулирования выходного напряжения, существенно повысить удельные характеристики машины. Конструктивно это связано с переходом к КВ при размещении ПМ в полюсной зоне индуктора либо в виде одиночных полюсных выступов, либо в виде общего для ряда одноименных зубцов источника м. д. с. При относительно больших τ (15—35 мм) удельные характеристики машины можно улучшить одновременным действием трех факторов: увеличить общее число полюсных выступов индуктора, улучшить использование магнитного потока двойного полюсного деления (на всей окружности индуктора или ее части) и, наконец, уменьшить сечение осевых магнитопроводов (рис. 2—4). При меньших τ (10—15 мм) остаются два последних фактора, а при предельно малых τ (менее 10 мм) — только последний.
В целом изложенное свидетельствует о перспективности предложенного направления усовершенствования
АИМ, способствующего созданию высокоиспользованных регулируемых источников питания повышенной частоты.
Список литературы
- Альпер Н. Я., Терзян А. А. Индукторные генераторы. М.: Энергия, 1970.
- Домбур Л. Э. Аксиальные индукторные машины. Рига: Зинатне, 1984.
- Кронеберг Ю. Н. Классификация регулируемых электрических машин альтернативно-пульсационного типа // Электротехника. 1986. № 6.
- А. с. 877721 СССР. Синхронная машина / Ю. Н. Кронеберг // Открытия. Изобретения. 1981. № 40.
- А. с. 890526 СССР. Индукторный генератор / Ю. Н. Кронеберг // Открытия. Изобретения. 1981. № 46.