Для нормальной работы двигателя постоянного тока необходимо изменять направление тока в проводниках якорной обмотки при изменении его положения относительно полюсов магнитного поля статора. Это переключение в обычных двигателях постоянного тока обеспечивается с помощью коллектора, простейшая конструкция которого показана на рис. 2,в. Однако наличие этого устройства, принципиально необходимого для двигателей постоянного тока, вызывает появление у этих двигателей некоторых нежелательных свойств.
В первую очередь к ним относится необходимость постоянного надзора и ухода за коллекторно-щеточным узлом, так как при эксплуатации двигателя щетки истираются, а коллектор загрязняется и обгорает. Кроме того, неизбежное искрение щеточно-коллекторного аппарата создает радиопомехи, затрудняет применение двигателей во взрывоопасных помещениях и средах. Работа коллекторно-щеточного узла создает также дополнительный шум при работе двигателя.
Стремление устранить механический коллекторно-щеточный узел и заменить его каким-либо бесконтактным устройством с теми же функциями привело к появлению так называемых бесконтактных двигателей постоянного тока. Эти двигатели имеют такие же характеристики, как двигатели с обычным коллектором, но обладают более высокой надежностью и простотой в эксплуатации, не создают при своей работе радиопомех и дополнительного шума.
В настоящее время разработано несколько видов таких двигателей, отличающихся друг от друга способом возбуждения, схемами включения обмоток и типами электрических коммутирующих устройств.
Подробное описание всех типов бесконтактных двигателей постоянного тока выполнить очень трудно, поэтому остановимся лишь на пояснении основных принципов их действия, общих для всех двигателей.
Схема рис. 1 иллюстрирует принцип работы так называемого двигателя с вращающимся выпрямителем.

Рис. 1. Принцип работы бесконтактного двигателя постоянного тока с вращающимся выпрямителем.
Обмотка якоря изображена рамкой, состоящей из проводников А и Б, помещенных в поле магнита N—S.
Представим, что на якоре расположено устройство, состоящее из четырех управляемых ключей К1—К4, которые могут замыкаться или размыкаться любым необходимым нам образом. Эти ключи соединены в так называемую мостовую схему, к одной из диагоналей которой подключены проводники рамки А и Б, а к другой с помощью скользящих контактов СК подводится напряжение от внешнего источника постоянного тока.
Обратимся вначале к схеме на рис. 1,а. Пусть в указанном на этой схеме положении рамки будут замкнуты ключи К1 и КЗ и разомкнуты ключи К2 и К4. Тогда ток в проводниках А и Б будет иметь указанное на рисунке направление и рамка под действием сил F будет поворачиваться против часовой стрелки.
Рассмотрим теперь положение рамки после ее поворота на 180°, показанное на рис. 1,6. Допустим при этом, что ключи К1 и КЗ разомкнулись, а ключи К2 и К4 замкнулись. Тогда, как нетрудно заметить из рис. 1,6, ток в проводниках А к Б изменит свое направление на противоположное. Вследствие этого сохранится взаимное расположение полюсов магнитного поля и проводников с током, соответствующее показанному на рис. 1,а, а тем самым и направление момента и частоты вращения якоря двигателя. При повороте рамки еще на 180° (рис. 1,а) вновь должны замкнуться ключи К1 и КЗ и разомкнуться ключи К2 и К4 и так далее.
Таким образом, имея рассмотренную ключевую схему, в которой ключи управляются в зависимости от положения рамки (якоря) двигателя указанным способом, можно обеспечить обычную работу двигателя постоянного тока.
Однако преимущества рассмотренной схемы коммутации по сравнению с обычным коллектором (механическим коммутатором) проявятся, очевидно, лишь в том случае, если ключи К1—К4 будут бесконтактными элементами, например полупроводниковыми приборами. Поэтому в реальных бесконтактных двигателях постоянного тока в качестве ключей К1—К4 мостовой схемы, приведенной на рис. 15, используются транзисторы (для двигателей небольших мощностей) или управляемые полупроводниковые диоды-тиристоры (для двигателей средних и больших мощностей.). Открытие и закрытие транзисторов или тиристоров происходят по сигналам специального датчика положения, который укреплен на роторе и выдает управляющие импульсы на соответствующие бесконтактные ключи в зависимости от положения проводников обмотки.
Таким образом, необходимыми элементами бесконтактного двигателя являются мостовая переключающая схема с бесконтактными полупроводниковыми ключами и датчик положения, управляющий этими ключами.
Следует отметить, что в некоторых конструкциях двигателей в качестве ключей используются герметичные контакты (герконы).
Однако у такого двигателя имеется существенный недостаток: токоподвод к якорю происходит с помощью скользящего щеточного контакта. Хотя такой узел рис. 2. Бесконтактный двигатель постоянного тока с обмоткой переменного тока на статоре (щетка — контактное кольцо) и не создает столько неудобств, сколько щеточно-коллекторное устройство, его наличие все же является нежелательным.
Результатом разработок полностью бесконтактного двигателя постоянного тока является конструкция, показанная на рис. 2. Она во многом напоминает устройство синхронного двигателя с возбуждением от постоянных магнитов: ротор двигателя (в такой конструкции двигателя он часто называется индуктором) представляет собой постоянный магнит, а обмотка переменного тока (на рис. 2 показан лишь один ее виток) уложена на неподвижной части двигателя — статоре. В остальном конструкция двигателя соответствует схеме на рис. 1: питание обмотки осуществляется от одной диагонали мостовой схемы, на вторую диагональ которой подается напряжение сети постоянного тока. Ключи К1—К4, образующие мостовую схему, также управляются от датчика положения ДП, установленного на роторе двигателя. В качестве ключей используются, как правило, транзисторы или тиристоры. Датчик положения вырабатывает импульсы для управления ключами таким образом, чтобы обеспечивалось нужное направление тока в проводниках обмотки статора при изменении положения ротора (индуктора).
Остановимся теперь несколько подробнее на описании специфичных узлов бесконтактного двигателя постоянного тока: мостовой схемы и датчика положения. Назначением мостовой схемы, как уже отмечалось выше, является изменение направления тока в обмотке якоря при работе двигателя, или, другими словами, преобразование постоянного тока источника питания в переменный ток проводников обмотки якоря.

Такое устройство, преобразующее постоянный ток в переменный, называется инвертором в отличие от выпрямителя, который преобразует переменный ток в постоянный).
Рассмотрим одну из распространенных схем тиристорного инвертора — мостовую двухполупериодную однофазную схему, работа которой по существу и рассматривалась выше на примерах схем рис. 1 и 2.
Основную часть схемы инвертора (рис. 3,а) образуют четыре тиристора 77—Т4 (аналогия ключей К.1— К4 в схемах на рис. 1 и 2). Тиристоры управляются импульсами напряжения от датчика положения: при подаче импульсов тиристоры начинают пропускать ток — открываются, при снятии импульсов—закрываются (отметим, что при питании тиристоров от сети постоянного тока для их закрытия после снятия управляющего импульса должна использоваться специальная коммутационная схема, которая на рис. 2 не показана.
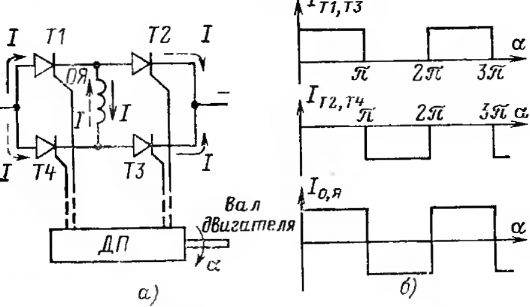
Рис. 3. Принцип работы инвертора.
а - электрическая схема; б — диаграмма токов в элементах инвертора.
Тиристоры работают попарно и попеременно: в течение половины оборота ротора двигателя включены (пропускают ток) тиристоры 77 и ТЗ, в течение второй половины оборота — тиристоры Т2 и Т4. Как видно из схемы, приведенной на рис. 3,а, при открытии тиристоров 77 и ТЗ ток в обмотке якоря имеет одно направление (сплошные стрелки на рисунке), а при открытии тиристоров Т2 и Т4 и закрытии тиристоров 77 и ТЗ ток изменит свое направление в обмотке якоря на противоположное (пунктирные стрелки).
Токовая диаграмма работы элементов схемы, приведенной на рис. 3,а, в зависимости от угла поворота а ротора двигателя показана на рис. 3,6, где 1Т, Ля — соответственно токи тиристоров и обмотки якоря.
Для бесконтактных двигателей постоянного тока разработано несколько типов датчиков положения ротора, которые при своей работе обычно используют энергию магнитного или электрического поля или лучевую энергию.
К датчикам, использующим энергию магнитного поля, относятся индуктивные датчики, датчики Холла, магниточувствительные сопротивления и магнитодиоды.
Индуктивные датчики в свою очередь подразделяются на датчики электродвижущей силы (ЭДС) вращения, датчики с переменным воздушным зазором и датчики с подмагничиванием. Наибольшее распространение для бесконтактных двигателей нашли дифференциальные трансформаторные датчики с переменным воздушным зазором. Эти датчики отличаются простотой и надежностью конструкции и вырабатывают импульсы для управления полупроводниковыми ключами инвертора с требуемыми параметрами.
Схема датчика положения этого типа показана на рис. 4.

Рис. 4. Схема датчика положения ДП бесконтактного двигателя.
Датчик состоит из Ш-образного сердечника 1 и цилиндрического якоря 2 с вырезом, соединяемого с ротором двигателя. На сердечнике датчика расположены три обмотки. Две из них, называемые обмотками возбуждения, располагаются на крайних стержнях и включаются последовательно-встречно. При таком их включении магнитный поток в среднем стержне всегда равен разности магнитных потоков от каждой обмотки возбуждения. На среднем стержне находится обмотка управления датчика, с которой снимается сигнал Uy для управления инвертором. Обычно обмотки возбуждения питаются от переменного напряжения повышенной частоты (в 10—20 раз превышающей частоту коммутации тока в проводниках обмотки якоря), что позволяет снизить габариты датчика.
Датчик работает следующим образом. Когда якорь датчика перекрывает все три стержня сердечника, магнитные потоки каждой обмотки возбуждения равны, ЭДС в катушке управления не наводится и импульсы управления на инвертор не подаются.
Если же якорь перекрывает средний стержень и один из крайних (что имеет место при показанном на рис. 4 положении ротора), то магнитные потоки обмоток возбуждения становятся различными, появляется магнитный поток в среднем стержне и в обмотке управления наводится ЭДС.
При непрерывном вращении якоря обмотка управления вырабатывает последовательность импульсов, при этом их продолжительность (а точнее, скважность — отношение длительности импульса к периоду повторяемости) определяется конфигурацией якоря. Так, при показанном на рис. 4 вырезе, составляющем половину окружности якоря, длительность импульса составляет половину периода.
Практически схемы таких датчиков положения содержат несколько сердечников, число которых соответствует количеству секций (проводников) обмотки якоря.
Перспективным является также применение датчиков положения, использующих гальваномагнитный эффект Холла. Сущность его заключается в том, что в некоторых полупроводниках при прохождении по их продольной оси электрического тока и воздействии внешнего магнитного поля на электродах поперечной оси возникает разность потенциалов. Таким образом, если датчик Холла поместить на статоре двигателя и подвести к нему ток по продольной оси, то при прохождении полюсов индуктора двигателя (или специального индуктора) вблизи датчика на электродах его поперечной оси появляется разность потенциалов (ЭДС датчика), которая может быть использована для управления инвертором.
В качестве датчиков положения могут использоваться различные магниточувствительные сопротивления и магнитодиоды, внутреннее сопротивление электрическому току которых зависит от величины внешнего магнитного потока.
Распространение получили также различные датчики, использующие лучевую энергию. Они состоят из источника излучения и приемника. Источниками лучистой энергии могут быть различные радиоактивные элементы, электрические лампы и светодиоды. В качестве приемников для этих датчиков применяются фоторезисторы, фотодиоды и фототриоды. Фототриоды обладают лучшими показателями работы — значительной чувствительностью и выходной мощностью, малой инерционностью, но являются более дорогими приборами.
Меньшее распространение для бесконтактных двигателей постоянного тока получили емкостные датчики — устройства, использующие для своей работы энергию электрического поля. По принципу своего действия они представляют собой конденсаторы, емкость которых зависит от положения индуктора двигателя. Эти датчики маломощны, подвержены влиянию паразитных емкостей, требуют дополнительных согласующих схем для совместной работы с инверторами.
Выше уже отмечалось, что по своему устройству бесконтактный двигатель постоянного тока во многом повторяет синхронный двигатель. Поэтому в принципе любой синхронный двигатель может быть превращен в бесконтактный двигатель постоянного тока, если обмотки статора питать от трехфазного инвертора, который будет управляться сигналами датчика положения, установленного на роторе (индукторе) этого синхронного двигателя. Такая система (синхронный двигатель—инвертор—датчик положения) обладает характеристиками и свойствами двигателя постоянного тока.
Вместе с тем электропромышленность выпускает и специально сконструированные бесконтактные двигатели постоянного тока. В основном это двигатели малой мощности, применяемые в различных устройствах автоматики, звукозаписывающей и звуковоспроизводящей аппаратуре, часовых и лентопротяжных механизмах, измерительной аппаратуре и т. д.
В табл. 1 приведены технические данные бесконтактных двигателей постоянного тока серии МБ.
Таблица 1

Двигатели этой серии имеют возбуждение от постоянных магнитов и снабжаются инвертором на транзисторах, который конструктивно выполнен в виде отдельного блока. Этот блок герметизирован и имеет объем от 400 до 900 см3. Датчик положения двигателей МБ трансформаторного типа встроен в корпус двигателя. Двигатели серии МБ допускают регулирование частоты вращения в широких пределах. Первые четыре двигателя, приведенные в табл. 1, имеют стабилизированную частоту вращения. Контроль частоты вращения осуществляется с помощью встроенного синхронного тахогенератора, имеющего при номинальной частоте вращения напряжение 6 В. Двигатели этой серии имеют нормальное исполнение с креплением двигателя за корпус (буква Н в названии двигателя) и фланцевое исполнение (буква Ф). Внешний диаметр двигателей серии МБ колеблется от 35 до 70 мм, а их длина — от 62 до 106 мм.