Для выполнения двигательных функций, аналогичных функциям человеческой руки при перемещении объектов в пространстве, применяется манипулятор — управляемое устройство (машина), оснащенное рабочим органом, принципиальная схема которого представлена на рис. Он состоит из подвижной тележки 1, перемещающейся со скоростью V1 в плоскости XY по направлению У—У, тумбы 2, которая со скоростью V2 поворачивается относительно оси на 360°, перемещающихся плечевого звена 3 со скоростью Уз на угол ocи в плоскости Z—X, локтевого звена 4 относительно оси 02—02 со скоростью V4 на угол а2 в плоскости XZ, кистевого звена 5 независимо относительно оси Оз—03 со скоростью Уь- Суммарное перемещение всех звеньев манипулятора со скоростью VB на предельные расстояния определяет рабочую зону, которая ограничивается в плоскости ХУ радиусом R и прямыми У1—Уi и У2—У2, а в плоскости XY и YZ радиусом Ri. Охват манипулятора может быть зафиксирован в любой точке Mi(Xi, У/, Z,) и переместится в любую другую точку, ЛГ. (Х;, Yt, Z\) в пределах рабочей зоны.
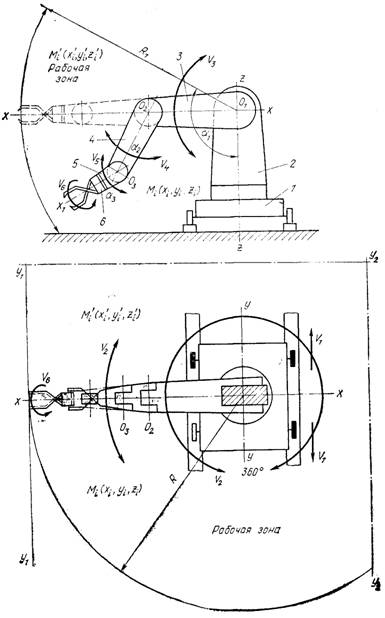
Принципиальная схема манипулятора
В зависимости от системы управления манипуляторы подразделяются на биотехнические (с ручным управлением), интерактивные (со смешанным управлением) и автоматические. Широки перспективы применения манипуляторов в горной и металлургической промышленности, а также в других немашиностроительных отраслях, где в настоящее время используется 10—15 % всего мирового папка промышленных роботов и манипуляторов.
При изготовлении крупных поковок массой >1 т (для подачи заготовок к молотам и прессам, загрузки и выгрузки их из печи) применяют манипуляторы различного типа, которые автоматизируют практически все вспомогательные процессы. Они производят захватывание заготовки клещами, вращение ее вокруг своей оси, передвижение вдоль фронта печей, молотов и склада заготовок, подъем и опускание.
При грузоподъемности до 2 т могут использоваться подвесные манипуляторы в виде удлиненных кантователей с клещевыми захватами, повешенные за две точки к транспортирующему средству (мостовому крану, тельферу и т. п.). Управление такими манипуляторами, как правило, осуществляется дистанционно с помощью двухкнопочного пульта.
Напольные манипуляторы, механизмы которых смонтированы на самоходной тележке, применяются при грузоподъемности >2 т, а при грузоподъемности >5 т — только напольные манипуляторы, смонтированные на рельсовых тележках.
Основным назначением ковочного напольного рельсового манипулятора грузоподъемностью до 80 т является поддержка и поворот раскаленной заготовки под молотом. При этом должны быть обеспечены быстрота и точность захвата заготовки, ее кантования и быстрая подача вдоль бойка. Процесс ковки требует усложнения конструкции манипуляторов и систем управления ими, которые должны обеспечить частичное перемещение заготовки под молотом в вертикальном и горизонтальном направлениях. Управляет такими манипуляторами дистанционно один оператор.
При командном дистанционном управлении манипулятором оператор, нажимая кнопки, тумблеры или клавиши, включает поочередно двигатели, реализующие соответствующие движения манипулятора. В результате обеспечиваются необходимые движения захвата и ориентация перемещаемого изделия, закрепленного на схвате манипулятора.
Копирующая система дистанционного управления манипулятором имеет задающее устройство, подобное исполнительному механизму манипулятора. Каждая степень подвижности задающего устройства связана с соответствующей степенью подвижности исполнительного механизма по принципу следящей системы. На первой ступени находятся задатчики, а на второй — исполнительные органы. Оператор, перемещая конец задающего устройства, может заставить двигаться одновременно все звенья: это движение будет скопировано рабочим манипулятором.
Полуавтоматическая система дистанционного управления манипулятором отличается тем, что в качестве задающего устройства используется многостепенная управляющая рукоятка с небольшим диапазоном перемещения. Оператор, легко нажимая на эту рукоятку управляет движением всех приводов манипулятора.
Дистанционно управляемые манипуляторы — командные, копирующие, полуавтоматические — объединяет то, что они выполняют работу только тогда, когда оператор рукой воздействует на задающее устройство.
Промышленный робот, по определению международной организации по стандартам (ISO),— это позиционно-управляемый, перепрограммируемый, многофункциональный манипулятор с несколькими степенями свободы, способный перемещать материалы, детали, инструмент и специальные приспособления и предназначенный для решения разнообразных задач в процессе осуществления различных программируемых движений.
В России принято близкое к этому определению понятие промышленного робота: автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций.
Разработано большое количество различных конструкций роботов для выполнения работ типа «взять — перенести — установить».
У манипуляционных робототехнических систем манипулятор — основной исполнительный орган, оканчивающийся захватом, инструментом, сварочной головкой, краскопультом и т. п.
Робототехнические системы по классам делятся: на мобильные, отличающиеся движущимся шасси (колесные, шагающие, колесно-шагающие, гусеничные) с автоматически управляемыми приводами; манипуляционные, часто устанавливаемые на мобильных машинах; информационно- управляющие, занимающиеся сбором информации от внешних источников по определенным алгоритмам и программам, которая в дальнейшем обрабатывается и выводится на внешние устройства, например дисплеи. Последние системы следят за ходом технологических процессов, осуществляют групповое управление манипуляционными и мобильными промышленными роботами и т. д.
Автоматически действующие манипуляционные роботы, в том числе промышленные, по принципам управления делятся на жестковстраиваемые, программные, адаптивные, интеллектные.
Жестковстраиваемые манипуляторы работают по единой программе в составе автоматического оборудования и обеспечивают выполнение одной какой-либо операции в технологическом процессе. Они применяются в автоматических линиях при массовом и серийном производствах. Типичными представителями жестковстраиваемых автоматических манипуляторов являются механические руки и автооператоры — предшественники промышленных роботов.
Программные, адаптивные и интеллектные роботы способны быстро перепрограммироваться на выполнение различных операций.
Программные перепрограммируются оператором и затем строго выдерживают заданную программу. Они выполняют свои функции подобно жестковстраиваемым манипуляторам и требуют строгой ориентации предметов манипулирования, т. е. необходима соответствующая околороботная механизация, которая включает накопители, ориентирующие и фиксирующие устройства и другие механизмы. Большинство современных программных промышленных роботов, применяемых для обслуживания прессов, механообрабатывающего оборудования, сборочных операций, относится к промышленным роботам (ПР) первого поколения.
Адаптивные ПР относятся к роботам второго поколения. Для самостоятельной ориентации в определенной обстановке и приспособления к ней они снабжаются датчиками, реагирующими на внешнюю обстановку, системой обработки информации, получаемой от датчиков, и системой выработки сигналов адаптивного управления манипулятором в соответствии с фактической обстановкой. Для обработки информации и получения команд используются компактные микропроцессорные устройства. Роботы второго поколения находят широкое применение на сборочных операциях, при дуговой сварке, покраске и на других работах.
Интеллектные ПР, относящиеся к роботам третьего поколения и обладающие искусственным интеллектом, имеют средства очувствления с микропроцессорной обработкой информации, что позволяет им распознавать обстановку и автоматически выбирать необходимое решение для выполнения требуемой технологической операции в неопределенной и меняющейся обстановке. Широкое их применение предполагается после 2000 года. Они должны найти применение для работ в космосе, на дне океана, в шахтах и при обслуживании металлургических агрегатов, в быту сфере обслуживания населения.
Биотехнические манипуляторы, или манипуляторы с ручным управлением, делятся на два вида.
Шарнирно-сбалансированные манипуляторы являются многозвенным механизмом с приводом в каждом суставе. При удерживании груза массой в пределах грузоподъемности манипулятора в любой точке рабочего пространства, т. е. при любом расположении звеньев манипулятора, вся система находится в равновесии. Оператору для перемещения груза из одной, точки рабочего пространства в другую необходимо приложить лишь небольшое усилие. Они находят широкое применение на погрузочно-разгрузочных работах по обслуживанию станков, машин и другого оборудования, успешно заменяя крановое оборудование.
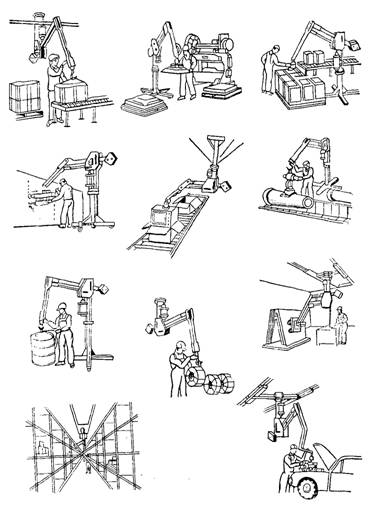
Примеры использования сбалансированных манипуляторов
Экзоскалетоны-манипуляторы, звенья которых непосредственно соединены с конечностями человека и принимают на себя всю тяжесть работы, подчиняясь движению конечностей человека. Такие системы встраиваются в водолазные костюмы, скафандры, что облегчает работу человека на дне океана.
Дистанционно управляемые ПР и манипуляторы, или интерактивные, делятся на шесть видов.
Манипуляторы с командным управлением работают в паре с рабочим оператором и выполняют те или иные операции в автоматическом режиме в зависимости от команды оператора. Такие манипуляторы используют на подводных лодках, во вредных производствах, где манипулятор и человек изолированы друг от друга.
Копирующие манипуляторы работают по принципу следящей системы, т. е. выполняют работу, которая соответствует движению рук оператора, причем человек находится вне зоны действия манипулятора.
Полуавтоматические манипуляторы отличаются от копирующих тем, что в качестве задающего устройства на пульте оператор имеет компактную многостепенную управляемую рукоятку, кинематика которой может быть произвольной, удобной для руки человека. Сигналы от рукоятки преобразуются специальной вычислительной системой и подаются на исполнительный орган — манипулятор.
Манипулятор с супервизорным управлением работают по заданной программе, выполняют операции с объектом манипулирования в автоматическом режиме, но под наблюдением оператора, вносящего при необходимости корректировку в программу, либо изменяющего ее полностью.
Манипуляторы с комбинированным управлением отличаются от манипулятора с супервизорным управлением тем, что оператор в зависимости от сложившейся обстановки может перейти на ручное управление манипуляторами. Манипуляторы с супервизорным и комбинированным управлением применяются в настоящее время в металлургическом производстве, при обслуживании атомных реакторов, в рудниках и на других вредных производствах.