Разновидности вентильных каскадов отличаются способом введения добавочной ЭДС в цепь ротора асинхронного двигателя и видом преобразователя частоты, включенного в роторную цепь двигателя. По этим признакам классификация вентильных каскадов приведена на рис. 31.

Рис. 31. Классификации вентильных каскадных электроприводов
Основная схема вентильного каскада с промежуточной цепью постоянного тока (рис. 32) содержит простой вентильный преобразователь, который состоит из двух групп вентилей В и И. Роторная группа В — неуправляемая. Вторая группа И — зависимый инвертор. Эта схема не обеспечивает работу привода в двигательном режиме при сверхсинхронной скорости и в генераторном режиме при скорости ниже синхронной. Большинство выполненных промышленных установок построены по этой схеме. Группа вентилей

Рис. 32. Вентильный каскад с промежуточной цепью постоянного тока и инвертором по нулевой схеме

Рис. 33. Вентильный каскад с инвертором по мостовой схеме
В служит для выпрямления тока ротора. Роль источника добавочной ЭДС выполняет инвертор, содержащий группу управляемых вентилей И и трансформатор Т. Для управления вентилями инвертора применяются обычные системы, рассчитанные на частоту 50 Гц. Инверторный преобразователь выполнен по трехфазной нулевой схеме. Возможны и другие схемы соединения вентилей инвертора. Наиболее часто применяется трехфазная мостовая схема, показанная на рис. 33 (для приводов небольшой мощности), и схема «две обратные звезды с уравнительным реактором» (для приводов большой мощности).
В схемах вентильных каскадов с промежуточной цепью постоянного тока функции групп вентилей В и И четко разграничены: вентили В работают в выпрямительном режиме, преобразуя переменный ток ротора, имеющий частоту скольжения, в постоянный; вентили И работают в режиме зависимого инвертора, преобразуя выпрямленный ток ротора в переменный ток с частотой сети.
На рис. 34 приведена схема вентильного каскадного электропривода с полностью управляемыми выпрямителем В, инвертором И в роторной цепи и трансформатором Т, согласующим параметры роторной цепи двигателя с параметрами питающей сети. Иными словами, обмотка ротора двигателя связана с сетью через преобразователь частоты со звеном постоянного тока, ведомый сетью. В некоторых случаях трансформатор Т может отсутствовать.
Напряжение контура постоянного тока связано с напряжением сети следующим соотношением:
где Uх — напряжение питающей сети;
аи — угол регулирования вентилей инвертора; kИ — коэффициент, зависящий от схемы включения вентилей и коэффициента трансформации трансформатора.

Рис. 34. Вентильный каскад с управляемым выпрямителем
Величина напряжения на зажимах управляемого выпрямителя определяется зависимостью
![]()
где Uср= Uср0 s — выпрямленное напряжение при текущем значении скольжения s;
Uср0 — выпрямленное напряжение при неподвижном роторе и угле αВ = 0;
<αВ— угол регулирования вентилей выпрямителя. Следовательно, из равенства
![]()
величина скольжения двигателя может быть определена соотношением
![]()
Таким образом, регулирование скорости каскадного электропривода можно осуществить путем изменения угла регулирования выпрямительной или инверторной группы (ав или аи). Наиболее целесообразно для изменения скорости воздействовать на инверторную группу.
Для осуществления двухзонного регулирования скорости (ниже и выше синхронной скорости) обе группы вентилей должны быть управляемыми. При этом для работы со скоростью выше синхронной инверторная группа переходит в выпрямительный режим, а выпрямительная — в инверторный.
Особенностью таких схем является то, что для управления вентилями роторной группы управляющие импульсы должны подаваться с частотой, соответствующей частоте роторного напряжения f2. Это требует применения специальной системы управления, более сложной, чем обычная.
В том случае, когда применяются преобразователи без промежуточной цепи постоянного тока (см. рис. 31), четкое разграничение функций вентилей исключается. Одни и те же вентили одновременно выполняют функции и выпрямления и инвертирования (преобразования частоты). Если управление вентилями зависит от частоты скольжения, то работа асинхронного вентильного каскада без промежуточной цепи постоянного тока обеспечивает только однозначное регулирование скорости. Невозможность перехода через синхронную скорость объясняется тем, что коммутация тока между вентилями или группами вентилей при скорости, близкой к синхронной, нарушается, так как частота управляющих сигналов приближается к нулю. В предельном случае в обмотки ротора подается постоянный ток и асинхронный двигатель синхронизируется.
Для обеспечения двухзонного регулирования в каскадах без промежуточной цепи постоянного тока необходимо, чтобы коммутация тока между вентилями происходила как под действием напряжения ротора, так и под действием напряжения сети. В этом случае возможен переход через синхронную скорость, но управление вентилями в зоне скоростей, близких к синхронной, должно быть независимым от частоты и фазы напряжения ротора.
Схемы вентильных каскадов без промежуточной цепи постоянного тока с независимым управлением величиной и фазой добавочной ЭДС представляют, по существу, схемы асинхронных двигателей двойного питания, где статор двигателя получает питание от сети с частотой 50 Гц, а ротор присоединен к вентильному преобразователю частоты, обеспечивающему регулирование частоты, амплитуды и фазы напряжения. Если все три величины задаются независимо и регулируются по определенному закону в функции скорости и нагрузки привода, то регулируемый асинхронный двигатель обладает свойствами синхронной машины — синхронный принцип. Если частота преобразователя устанавливается в зависимости от частоты напряжения ротора, то имеет место асинхронный принцип управления машиной двойного питания. Такие машины называют асинхронизированными синхронными двигателями с управлением по синхронному или асинхронному принципам.
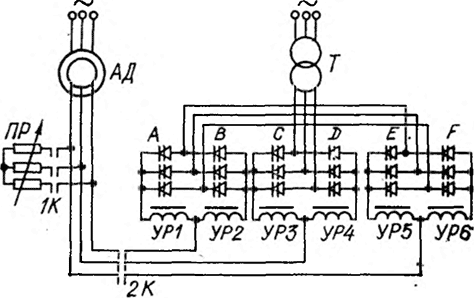
Рис. 35. Вентильный каскад без промежуточного выпрямителя
Наиболее перспективная схема вентильного каскада без промежуточной цепи показана на рис. 35. К каждой фазе ротора двигателя через уравнительные реакторы присоединены две группы вентилей противоположной полярности. Рассматривая каждую трехвентильную группу как один вентиль, можно представить, что они образуют мостовую схему, подобную приведенной на рис. 32. Трансформатор Т согласует напряжение сети и напряжение ротора двигателя.
Коммутация тока между отдельными вентилями в каждой группе происходит с частотой сети, и эти вентили можно рассматривать как вентили трансформаторной группы основной схемы вентильного каскада (см. рис. 32). Все вентили схемы должны быть управляемыми, при этом управление должно осуществляться как с частотой сети, так и с частотой скольжения.
При работе в двигательном режиме ниже синхронной скорости добавочная ЭДС в цепи ротора (в данном случае напряжение трансформатора Т) должна быть направлена встречно напряжению ротора. Поэтому ток должен проходить через вентили так, чтобы потенциал анодов вентилей групп В, D и F, определяемый напряжением ротора, был наиболее положительным, а потенциал катодов вентилей групп Л, С и Е — наиболее отрицательным. В то же время через вторичные обмотки трансформатора ток должен проходить таким образом, чтобы ЭДС трансформатора была направлена противоположно направлению тока.