ГЛАВА ДЕВЯТАЯ
ЯВНОПОЛЮСНЫЕ СИНХРОННЫЕ МАШИНЫ
9-1. ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР РАЗМЕРОВ И ПАРАМЕТРОВ
Диаметр и длина сердечника. Явнополюсные синхронные машины используются в качестве двигателей и генераторов переменного тока, а также синхронных компенсаторов при мощности от десятков ватт до сотен мегаватт и скорости вращения от 1500 до 40 об/мин (в редких случаях изготовляются машины явнополюсной конструкции со скоростью вращения, выходящей из указанных пределов). Наиболее быстроходные синхронные явнополюсные машины используются в качестве двигателей механизмов с равномерной нагрузкой и синхронных компенсаторов, наиболее тихоходные—в качестве гидрогенераторов и дизель-генераторов. Преимуществом явнополюсного исполнения магнитной цепи является более высокий обмоточный коэффициент обмотки возбуждения, расположенной на полюсах и имеющей диаметральный шаг, а также увеличенная средняя индукция при одинаковом ее максимальном значении (по сравнению с неявнополюсной машиной) за счет изменения формы поля. Недостатком является меньшая по сравнению с неявнополюсной конструкцией прочность ротора, позволяющая реализовать преимущества конфигурации магнитной цепи только в известном диапазоне скоростей вращения.
Использование синхронной явнополюсной машины, как правило, определяется якорем, а не индуктором (первый обычно является статором, второй- ротором). Причиной этому служит то обстоятельство, что при относительно низкой скорости вращения полюсное деление редко ограничивается по прочности, и можно разместить в роторе достаточный объем меди при хорошем ее охлаждении. Поэтому выбор полюсного деления может производиться по зависимостям, полученным в главе 2 для якоря машины переменного тока.
Такие зависимости приведены на рис. 2-6—2-8 для различных типов явнополюсных синхронных машин. По ним можно непосредственно выбирать значение τ в пределах зоны допустимых значений. Длину сердечника можно определить по формуле:
![]() (9-4)
(9-4)
Показатель г здесь соответствует зависимости линейной нагрузки и высоты паза от полюсного деления, обеспечивающей определенную зависимость мощности от размеров. Если, например, при построении ряда машин мы стремимся иметь минимум штампов и сохраняем высоту паза и пазовое деление почти постоянными независимо от мощности на полюс и значения полюсного деления, то зависимость линейной нагрузки от полюсного деления должна ослабляться и значение г должно быть ближе к нижнему пределу. В таких случаях целесообразно воспользоваться данными уже выполненных машин аналогичного назначения. При разработке даже индивидуального проекта машины желательно, чтобы она была как бы частью существующей или спроектированной серии, что в большей степени может сократить затраты и время на подготовку производства. Поэтому, если не препятствуют другие ограничения, желательно максимально приблизить проектируемую машину к какому-либо существующему прототипу, использовать существующие штампы сердечников статоров и полюсов, даже если эти штампы разработаны для машины с несколько отличающейся скоростью вращения, но подходят для вновь требующегося числа пар полюсов.
При проектировании по прототипу, естественно, что полюсное деление определяется выбранными размерами сердечника прототипа, а длина сердечника определяется по формуле (9-4). Если заданные при проектировании значения скорости вращения или частоты, превышения температуры обмотки и переходной реактивности отличаются от значений этих величии у прототипа, необходимо соответствующим образом изменить длину или другие переменные основного уравнения для мощности (9-1).
- Для синхронных машин с большим значением мощности на полюс (быстроходные гидрогенераторы, синхронные компенсаторы), как правило, выгодно выбирать максимальное возможное по условиям прочности полюсное деление. Обычно пользуются максимальной окружной скоростью, подсчитанной на диаметре сердечника статора, vокр. При этом
![]()
(9-5)
Таблица 9-1
Максимальные допустимые значения окружной скорости для явнополюсных синхронных машин
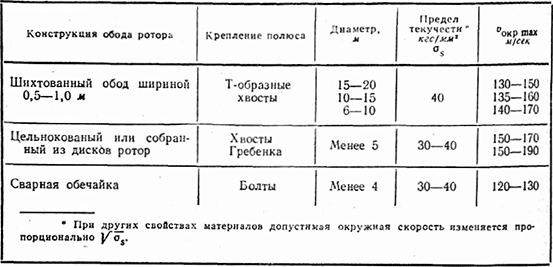
Примерные значения максимальной окружной скорости для различных типов роторов приведены в табл. 9-1.
- Для относительно тихоходных машин основным ограничением является значение диаметра. Диаметр гидрогенераторов ограничивается размерами здания ГЭС, для дизель-генераторов с горизонтальным валом увеличение диаметра свыше известных пределов приводит к недопустимому утяжелению статора вследствие необходимости сохранить его жесткость. С другой стороны, для этих типов машин требуется обеспечить определенное значение махового момента GD2.
Значение махового момента на единицу длины машины пропорционально четвертой степени диаметра, если ротор представляет собой сплошной цилиндр. Для явнополюсных машин с достаточным приближением зависимость GD2 от диаметра аппроксимируется формулой:
![]()
(9-6)
Используя это равенство совместно с уравнением (9-2), получаем формулу для выбора минимального возможного значения диаметра
![]()
(9-7)
Как и при выборе значения τ по максимальной окружной скорости, в этом случае длина находится с помощью формулы (9-4).