Основным назначением любого двигателя является сообщение (передача) механической энергии рабочим органам производственных механизмов, необходимой им для совершения определенных технологических операций. Эту механическую энергию электродвигатель вырабатывает за счет электрической энергии, потребляемой им из электрической сети, к которой он подсоединен. Другими словами, электродвигатель преобразует электрическую энергию в механическую.
Количество механической энергии, вырабатываемой двигателем в единицу времени, называется его мощностью. Механическая мощность на валу двигателя определяется произведением вращающего момента двигателя и его частоты вращения. Отметим, что некоторые двигатели имеют поступательное движение, поэтому их механическая мощность зависит от развиваемого двигателем усилия и скорости этого поступательного движения.
В зависимости от характера питающего напряжения различают двигатели постоянного и переменного тока. К числу наиболее распространенных двигателей постоянного тока относятся, например, двигатели с независимым, последовательным и смешанным возбуждением, а примерами двигателей переменного тока являются асинхронные и синхронные двигатели.
Несмотря на многообразие существующих электродвигателей (в том числе и специального назначения), действие любого из них основано на взаимодействии магнитного поля и проводника с электрическим током либо магнитного поля и ферромагнитного тела или постоянного магнита.
Рассмотрим взаимодействие магнитного поля и проводника с электрическим током. Предположим, что В магнитное поле магнита с полюсами N—S (рис. 1),
Рис. I. Взаимодействие магнитного поля и проводника с током.
силовые линии поля которого показаны тонкими линиями, перпендикулярно к этим линиям помещен проводник стоком I. Тогда по известному физическому закону на этот проводник будет действовать сила F (сила Ампера), которая пропорциональна индукции магнитного поля В, длине проводника I и силе тока I:
F=BlI. (1)
Направление действующей на проводник силы F может быть определено так называемым правилом левой руки: если пальцы левой руки вытянуть по направлению тока I, а ладонь расположить так, чтобы линии магнитного поля входили в нее, то отогнутый большой палец покажет направление действия силы F.
Отметим, что в соответствии с законом электромагнитной индукции проходящий по проводнику ток создаст свое магнитное поле с концентрическими силовыми линиями вокруг проводника (на рис. 1 это поле не показано), в связи с чем картина магнитного поля между полюсами магнита несколько изменится. Однако это обстоятельство не изменяет существа рассматриваемого явления.
Изображенная на рис. 1 схема может служить простейшей моделью двигателя поступательного движения, поскольку под действием силы F проводник с током стремится совершить прямолинейное перемещение в направлении действия этой силы.
Для пояснения принципа образования вращающего момента в двигателях вращательного движения рассмотрим поведение в поле того же магнита рамки с током, состоящей из проводников А и Б (рис. 2,а). Ток к проводникам рамки подводится от внешнего источника постоянного тока через два контактных кольца К, укрепленных на оси вращения рамки 00'.

При изображенных на рис. 2,а положении рамки и направлениях тока и магнитного поля на проводники рамки А и Б будут действовать силы F, имеющие в соответствии с правилом левой руки указанные на рисунке направления. Эти силы создадут относительно оси рамки 00' вращающий момент М, под действием которого рамка начнет вращаться против часовой стрелки.
В курсе физики показывается, что этот момент прямо пропорционален силе тока I, индукции магнитного поля В, площади рамки с током 5 и зависит от угла а между линиями магнитного поля и осью рамки аа у перпендикулярной к ее плоскости:
M—BIS sin а—Мтах sin а, (2)
где Mmax=BIS — максимальный момент, развиваемый рамкой. При положении рамки, изображенной на рис. 2,а, угол а—90°, поэтому момент, действующий на рамку, максимален.
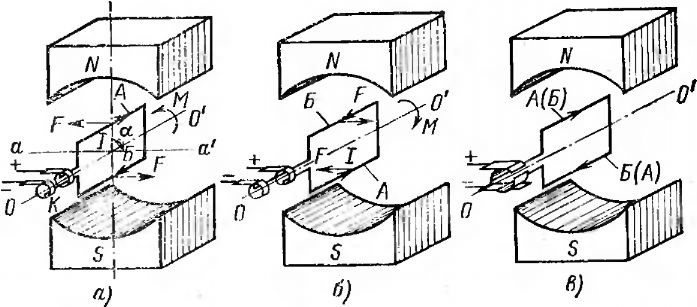
Рис. 2. Принцип действия двигателя постоянного тока. а — образование момента при а=90°; б — образование момента при а=270': е — образование постоянного по направлению вращающего момента.
Рассмотрим теперь другое положение рамки, когда она повернется на половину оборота и проводник А окажется уже под полюсом 5, а проводник Б — под полюсом N (рис. 2,6). Поскольку направление тока в проводниках сохранялось прежним, то по тому же правилу левой руки можно определить, что в этом положении рамки действующая на ее проводники сила F изменила свое направление на противоположное. Соответственно изменится на противоположное и направление вращающего момента М, который будет стремиться повернуть рамку уже в другую сторону, по часовой стрелке. Такой же вывод нетрудно сделать и на основании анализа формулы (2): так как угол а стал равен 270° (90°-f -)-180°) или, что то же самое, —90°, то sin а=—1 и момент изменил свой знак на противоположный.
Таким образом, рамка под действием изменяющегося по направлению момента будет совершать колебательное движение относительно своей оси вращения 00'. Такое устройство, очевидно, не может быть положено в основу двигателя вращательного движения постоянного направления, от которого обычно требуется момент постоянного направления и неизменное направление вращения.
Что же необходимо предпринять, чтобы образовывающийся вращающий момент на рамке имел постоянное направление? Нетрудно заметить, что для этого есть две принципиальные возможности:
1) изменять направление тока в проводниках рамки при изменении положения проводников под полюсами магнитной системы;
2) изменять направление магнитного поля при вращении рамки и неизменном направлении тока в ней, гили, другими словами, создавать вращающееся маг- агатное поле.
Первый из названных принципов использован в двигателях постоянного тока, второй — составляет основу работы двигателей переменного тока.
Рассмотрим вначале образование постоянного по направлению вращающего момента путем изменения направления тока в рамке и тем самым выясним принцип действия двигателей постоянного тока.
Для изменения направления тока в проводниках рамки необходимо, очевидно, иметь устройство, которое изменяло бы направление тока в рамке в зависимости от положения ее проводников.
Простейшее из возможных механических устройств такого типа может быть реализовано путем несложного изменения конструкции скользящих контактов К (рис. 2,а, б), служащих для подвода тока к рамке. Это преобразование заключается в замене двух контактных колец одним, но состоящим из двух изолированных друг от друга половинок (сегментов), к которым и подсоединяются проводники рамки А и Б (рис. 2,в). В этом случае, при повороте рамки на половину оборота направление тока в проводниках изменится на противоположное, поэтому вращающий момент сохранит свое направление и рамка будет продолжать вращаться в том же направлении. Подобное механическое переключающее устройство, называемое коллектором, используется в обычных двигателях постоянного тока. В некоторых специальных конструкциях двигателей, рассмотренных ниже, это переключающее устройство делается бесконтактным (электронным).
Реальный двигатель постоянного тока, упрощенная схема которого показана на рис. 3, имеет, конечно же, гораздо более сложную конструкцию по сравнению с показанной на рис. 2,в. Для получения большого вращающего момента берется обычно несколько десятков рамок, которые образуют обмотку 1 якоря. Проводники обмотки якоря размещаются в пазах цилиндрического ферромагнитного сердечника 2, а их концы присоединены к соответствующему количеству изолированных друг от друга сегментов кольца, образующего коллектор (на рисунке не показан).
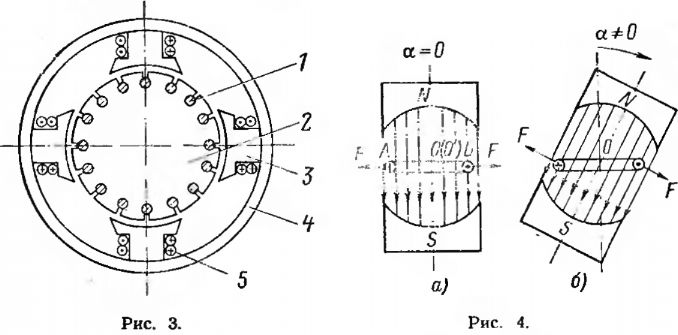
Рис. 3. Схема двигателя постоянного тока.
Рис. 4 Принцип действия синхронного двигателя. а — равновесное положение; б — образование вращающего момента
Сердечник, обмотка и коллектор образуют якорь двигателя, который вращается в подшипниках, установленных в корпусе двигателя. Ток к проводникам якоря подводится от сети постоянного тока с помощью скользящих щеточных контактов.
Магнитное поле создается полюсами 3 магнита, расположенными в корпусе 4 двигателя. Это магнитное поле обычно называют полем возбуждения. Для его образования могут использоваться постоянные магниты или электромагниты.
Обмотку электромагнита обычно называют обмоткой возбуждения (позиция 5 на рис. 3). Обмотка возбуждения подключается к сети постоянного тока и может быть включена независимо от обмотки якоря или последовательно с ней. В первом случае двигатель называется двигателем с независимым возбуждением, во втором случае — с последовательным возбуждением.
Некоторые двигатели постоянного тока имеют две обмотки возбуждения — независимую и последовательную. Такие двигатели получили название двигателей со смешанным возбуждением. Число полюсов магнитного поля возбуждения может быть и более двух, например четыре, как это показано на рис. 3.
Перейдем теперь к рассмотрению двигателей переменного тока.
Вновь обратимся к опытам с рамкой и рассмотрим ее положение, показанное на рис. 4,а. Заметим, что этот рисунок представляет собой упрощенный фронтальный вид схемы рис. 2,а, причем направление тока в проводнике, втекающего в плоскость чертежа, обозначено крестиком, а вытекающего из плоскости чертежа — точкой.
Из формулы (2) следует, что в изображенном горизонтальном положении рамки вращающий момент, действующий на рамку, равен нулю (а=0), хотя действующие на проводники А и Б силы отличны от нуля. Объяснение этого положения состоит в том, что направление действия этих сил проходит через ось вращения рамки 00', поэтому плечо сил F относительно этой оси равно нулю и вращающий момент не создается.
Такое положение рамки является равновесным, и она сохраняет состояние покоя.
Повернем теперь каким-то образом магнит N—S по часовой стрелке на некоторый угол а, не изменяя направление тока в проводниках, как это показано на рис. 4,6. Нетрудно заметить, что такой поворот магнита вызовет изменение направления действия сил F и появление плеча приложения этих сил относительно оси вращения рамки. В результате на рамку в соответствии с формулой (2) начнет действовать вращающий момент, стремящийся вернуть рамку в равновесное положение, и рамка вследствие этого повернется вслед за магнитом на тот же угол а.
Если теперь начать равномерно вращать магнит N—S, то и рамка будет вращаться в том же направлении синхронно с вращением магнитного поля, так как при появлении «несинхронизма» между вращением поля 12 и рамки (а=/=О) на последнюю сразу же начинает действовать момент, стремящийся синхронизировать это вращение. Двигатели, использующие этот принцип, получили поэтому название синхронных двигателей, а их момент, определяемый с помощью формулы (2), часто называют синхронизирующим моментом.
Итак, для работы синхронного двигателя необходимо создать вращающееся магнитное поле и поместить в него проводники, обтекаемые неизменным по направлению током.
Рассмотрим, как в реальных двигателях переменного тока получается вращающееся магнитное поле. Вращающееся магнитное поле синхронного двигателя образуется с помощью системы обмоток, подключаемых к сети переменного тока. Обычно в синхронных двигателях используются трехфазные обмотки, уложенные в пазы сердечника статора двигателя с определенным пространственным сдвигом по окружности. В теории электрических машин показывается, что если такую обмотку подключить к трехфазной сети переменного тока, то токи образуют вращающееся в воздушном зазоре двигателя магнитное поле, частота вращения которого п0 определяется частотой тока в сети f и числом пар полюсов двигателя р, образованных обмоткой статора:

Взаимодействие этого вращающегося магнитного поля с током в проводниках обмотки ротора и вызовет вращение синхронного двигателя, которое будет происходить синхронно с вращением магнитного поля статора.
При отсутствии момента нагрузки на валу синхронного двигателя оси магнитных полей статора и ротора совпадают (сс=0), двигатель не развивает момента и вращается с частотой п0. При появлении на в я л у двигателя момента сопротивления (нагрузки) ось поля ротора начнет отставать от оси поля статора, и этот процесс будет происходить до тех пор, пока при некотором угле аф0 вращающий (синхронизирующий) момент двигателя не станет равным моменту нагрузки. Синхронный двигатель будет продолжать вращаться с частотой щ, преодолевая момент сопротивления на своем палу.
Такое положение будет сохраняться до значения максимального момента двигателя, соответствующего углу «=90°. При дальнейшем увеличении момента нагрузки синхронный двигатель, как говорят, «выпадает из синхронизма» и останавливается. Таким образом, синхронный двигатель может преодолевать лишь определенный, номинальный момент сопротивления, который у синхронных двигателей соответствует углу а=20-30°.
Упрощенная схема синхронного двигателя приведена на рис. 5. В корпусе двигателя в пазах сердечника I укладывается трехфазная обмотка переменного тока 2, которая при подключении ее к сети переменного тока образует вращающееся магнитное поле. Сердечник с обмоткой образуют неподвижную часть двигателя — статор.
Роль рамки с током выполняет обмотка возбуждения 3 двигателя, расположенная на ферромагнитном сердечнике 4. Обмотка возбуждения имеет несколько десятков витков (рамок) и подключается к сети постоянного тока через контактные кольца и щеточный контакт (на рис. 5 эти части двигателя не показаны).
Обмотка возбуждения, сердечник и контактные кольца вместе с валом двигателя образуют ротор двигателя — его вращающуюся часть.
Синхронный двигатель, построенный по схеме рис. 5, обычно называют явнополюсным, что связано с наличием полюсов у сердечника ротора. Наряду с этим имеются так называемые неявнополюсные синхронные двигатели, у которых сердечник ротора не имеет явно выраженных полюсов.

Рис. 5. Схема синхронного двигателя с электромагнитным возбуждением.
Действие синхронного двигателя может основываться помимо рассмотренного выше принципа взаимодействия магнитного поля и проводника с током также и на принципе взаимодействия магнитного поля с постоянным магнитом или ферромагнитным телом. Для иллюстрации этого принципа рассмотрим поведение постоянного магнита 2, помещенного в поле магнита 1, как это показано на рис. 6. Из курса физики известно, что разноименные полюсы двух магнитов всегда притягиваются, а одноименные — отталкиваются. В соответствии с этим магнит 2 займет положение, при котором его северный полюс будет находиться у южного полюса магнита 1, а южный — у северного. Это положение будет являться равновесным для рассматриваемой системы из двух магнитов.

Рис. 6. Схема синхронного двигателя.
Рис. 7. Принцип действия асинхронного двигателя.
Отметим при этом очень важное обстоятельство: равновесное положение одновременно соответствует минимальному магнитному сопротивлению на пути магнитного потока и минимальному искривлению силовых линий магнитного поля. Другими словами, магниты стремятся занять такое взаимное положение, при котором линии магнитного поля мало искривляются, а магнитное сопротивление магнитному потоку минимально.
Теперь уже нетрудно выяснить, что будет происходить с магнитом 2, если начать вращать магнит I. Очевидно, он тоже начнет вращаться вместе с магнитом I, стремясь сохранить равновесное положение, причем частоты вращения обоих магнитов будут одинаковы (синхронны). Синхронные двигатели, роторы которых представляют собой постоянные магниты, называются синхронными двигателями с постоянными магнитами.
Такое же синхронное вращение ротора можно получить и в том случае, если вместо постоянного магнита 2 поместить в поле постоянного магнита I ферромагнитное тело такой же формы. Будучи помещенным в магнитное поле, ферромагнитный ротор намагнитится, причем у северного полюса магнита образуется южный полюс, а у южного полюса магнита — северный полюс ферромагнитного тела. Такое положение ферромагнитный ротор будет стремиться сохранить и при вращении магнитного поля, что и обусловливает работу синхронного двигателя с ротором в виде ферромагнитного тела. Такой тип двигателя получил название синхронного двигателя с реактивным ротором. Отметим, что для работы такого двигателя его ротор принципиально должен иметь явно выраженные полюсы, причем их число (не обязательно два) должно быть равно числу полюсов вращающегося магнитного поля.
Образование вращающегося магнитного поля синхронного двигателя реактивного и с постоянными магнитами происходит так же, как и у обычного синхронного двигателя, — с помощью статорной обмотки, подключаемой к сети переменного тока.
Для пояснения принципа работы другого, весьма распространенного типа двигателя переменного тока — асинхронного — вновь обратимся к опытам с рамкой, помещенной в магнитное поле. Однако на этот раз не будем подводить ток к рамке, а сделаем ее замкнутой, как это показано на рис. 7. Выясним, что будет происходить с такой рамкой, если вновь начать вращать полюсы магнита, допустим, с частотой вращения по по часовой стрелке.
Поскольку рамка вначале неподвижна, то при повороте магнита начнет изменяться магнитный поток, проходящий через рамку. Тогда в соответствии с законом электромагнитной индукции (закон Фарадея) в рамке начнет наводиться (индуцироваться) электродвижущая сила (ЭДС) индукции, под действием которой по проводникам рамки начнет протекать ток. Взаимодействие этого тока с магнитным полем приведет к появлению вращающего момента, под действием которого рамка начнет вращаться. В этом и состоит принцип действия асинхронного двигателя.
Для определения направления вращения рамки применим закон Ленца, согласно которому токи, протекающие в рамке при изменений магнитного потока через ее контур, имеют такое направление, при котором они препятствуют этому изменению. А поскольку в проводимом опыте это изменение вызвано вращением магнитного поля, токи в рамке будут иметь такое направление, при котором образующийся вращающий момент будет поворачивать рамку в том же направлении, что и поле, так как только в этом случае будет иметь место уменьшение изменения магнитного потока через контур рамки. Таким образом, рамка начнет вращаться в том же направлении, что и поле, но с частотой вращения п.
Отметим при этом одно принципиально важное обстоятельство — частота вращения рамки п всегда будет несколько меньше частоты вращения магнитного поля п0. Действительно, если предположить обратное, т. е. , что частоты вращения рамки и поля одинаковы, то магнитный поток через контур рамки не будет изменяться, не будут соответственно индуцироваться ЭДС и токи в рамке и вращающий момент исчезнет.
Таким образом, для создания на рамке вращающего момента принципиально необходимо различие между частотами вращения магнитного поля п0 и рамки п, т. е. асинхронность (несинхронность) их вращения, что и нашло свое отражение в названии этого вида электрического двигателя. Степень различия этих частот, вращения численно характеризуется так называемым скольжением асинхронного двигателя s, определяемым по формуле
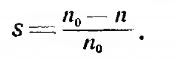
Необходимо при этом заметить, что при появлении на оси рамки момента нагрузки вследствие уменьшения частоты вращения рамки п (рамка тормозится) увеличится скольжение двигателя и магнитный поток через контур рамки начнет изменяться сильнее. При этом начнут увеличиваться ЭДС и токи в рамке и соответственно вращающий момент двигателя. Этот процесс будет происходить до тех пор, пока при некоторой частоте вращения рамки вращающий момент рамки не уравновесит момент нагрузки и не наступит новый установившийся режим работы. При снижении нагрузки происходит обратный процесс.
Итак, для работы асинхронного двигателя необходимо иметь вращающееся магнитное поле и замкнутые рамки (контуры) на вращающейся части двигателя — риторе.
Вращающееся магнитное поле асинхронного двигателя (рис. 8) образуется так же, как у синхронного,— с помощью обмоток 2, расположенных в пазах пакета I статора и подключаемых к сети переменного тока.
Обмотки 3 ротора асинхронного двигателя состоят обычно из нескольких десятков замкнутых рамок (контуров) и имеют два основных исполнения: короткозамкнутое и фазное.
При выполнении короткозамкнутой обмотки проводники, уложенные в пазы ферромагнитного пакета 4 ротора, замыкаются накоротко. Обычно такая обмотка получается заливкой расплавленного алюминия в пазы пакета и имеет название «беличья клетка».
При изготовлении «фазной» обмотки концы фаз обмотки выводятся наружу через скользящие контакты (кольца), что позволяет включать в цепь ротора различные добавочные резисторы, необходимые, например, для пуска двигателя или регулирования его частоты вращения.

Рис. 8. Схема асинхронного двигателя.
Необходимо заметить, что для получения вращающего момента асинхронного двигателя не обязательно размещать на роторе обмотку из электрических проводников. Можно изготовить ротор просто в виде сплошного ферромагнитного цилиндра и поместить его в обычный статор асинхронного двигателя. Тогда при подключении обмоток статора к сети и появлении вращающегося магнитного поля в массивном теле ротора будут индуцироваться так называемые вихревые токи (токи Фуко), направление которых также определяется законом Ленца. При взаимодействии этих токов с магнитным полем создается вращающий момент, под действием которого сплошной ротор начинает вращаться по направлению вращения магнитного поля, как и обычный ротор с обмоткой. Такие двигатели получили название асинхронных двигателей с массивным ротором.
Отметим, что вихревые токи возникают, конечно, и 9 сердечнике обычного ротора с обмоткой, однако в этом случае они являются вредными, поскольку вызывают дополнительный нагрев ротора. Обычно их действие стараются ослабить, для чего сердечник ротора собирают (шихтуют) из отдельных изолированных друг от друга листов электротехнической стали, создавая тем самым для вихревых токов большое электрическое сопротивление. В этом случае сердечник часто называют пакетом.
Рассмотренные в этом разделе общие принципы работы двигателей постоянного и переменного тока составляют физическую основу работы и двигателей специального назначения.
Электродвигатели как общего, так и специального назначения характеризуются номинальными данными, к которым относятся мощность на валу двигателя, напряжение, ток, частота вращения, КПД и некоторые другие величины. Основные номинальные данные регламентируются государственными стандартами (ГОСТ) на электрические машины и указываются в паспорте.
Номинальным данным двигателя соответствует нормальный тепловой режим его работы, при котором температура всех частей двигателя не превосходит допустимого уровня. Для обеспечения такого режима двигатель соответствующим образом рассчитывается и имеет систему охлаждения (вентиляции).
По способу охлаждения различают:
двигатели с естественным охлаждением, при котором нет специальных приспособлений для вентиляции;
двигатели с внутренней и внешней самовентиляцией, охлаждение которых осуществляется вентилятором, расположенным на валу двигателя и вентилирующим соответственно внутреннюю полость или внешнюю поверхность двигателя;
двигатели с независимым охлаждением, которые охлаждаются с помощью отдельного вентилятора («наездника»), имеющего собственный привод.
Работа двигателей характеризуется также и некоторыми другими величинами, которые непосредственно не указываются в его паспорте — номинальным моментом, соответствующим номинальным данным двигателя, и пусковыми моментом и током, которые соответствуют моменту пуска (подключения к сети) двигателя. При анализе работы двигателя значения пусковых момента и тока обычно сравнивают с соответствующими номинальными значениями. Момент и ток двигателя при пуске не должны превосходить определенных допустимых значений, определяемых условиями нагрева двигателя и нормальной работы его коллекторно-щеточного узла.
Принципы работы электродвигателей
- Подробности
- Категория: Электрические машины
- Вы здесь:
- Главная

- Оборудование
- Эл. машины
- Технология и оборудование производства электрических машин