Для многих производственных механизмов необходимо быстрое изменение значения или направления скорости движения рабочих органов, что требует от приводного двигателя обеспечения значительных ускорений или замедлений вращения вала, или, другими словами, высокого быстродействия.
Из курса физики известно, что ускорение (замедление) е при вращательном движении какого-либо материального тела (в данном случае ротора двигателя) прямо пропорционально моменту М, действующему на это тело, и обратно пропорционально моменту инерции J этого тела относительно оси вращения:

Из приведенной формулы следует, что для получения больших ускорений (замедлений) необходимо, чтобы двигатель развивал значительный вращающий момент М, а его ротор имел небольшой момент инерции J.
Выражение для максимального значения момента двигателя Мтах в соответствии с формулой (2) может быть записано следующим образом:
![]() (6)
(6)
где I — длина проводников рамки (длина ротора двигателя); г —расстояние от оси вращения рамки 00' до проводников (радиус ротора двигателя).
Момент инерции J цилиндрического тела (ротора двигателя) относительно оси вращения подсчитывается по формуле
 (7)
(7)
где m — масса цилиндра (ротора); г — радиус цилиндра (ротора).
Подстановка выражений (6) и (7) в формулу (5) приводит к следующему соотношению:
(8)

Полученная формула определяет способы повышения быстродействия двигателя. Они состоят в следующем:
повышение индукции магнитного ноля двигателя;
выполнение ротора двигателя с минимально возможной массой и с максимально возможным отношением длины к радиусу;
увеличение тока в обмотках двигателя.
Первый способ реализуется практически во всех двигателях — как обычных, так и специальных — путем соответствующего расчета магнитной системы. Второй и третий реализуются соответственно в специальных конструкциях двигателей с малоинерционным ротором и так называемым гладким якорем. Далее рассматриваются двигатели с малоинерционными роторами, снижение механической инерции которых обеспечивается уменьшением массы ротора или увеличением отношения его длины к радиусу.
Выясним, каким образом можно уменьшить массу ротора (якоря) двигателя.
Вспомним, что вращающий момент двигателя создается за счет сил, действующих на проводники с током, находящиеся на поверхности ротора (якоря). Сердечник же ротора, который и составляет основную массу вращающегося ротора, служит только для размещения (крепления) обмотки и проведения магнитного потока. А что если каким-то образом оставить во вращении только обмотку и вал ротора? Оказалось, что такая идея практически реализуема, в результате чего и появились малоинерционные двигатели, быстродействие которых в несколько раз выше, чем у обычных двигателей.
Наибольшее распространение получили две конструкции таких двигателей: с полым цилиндрическим ротором и дисковым ротором. Подобные конструкции ротора используются в основном для двигателей постоянного тока и асинхронных двигателей, которые главным образом применяются в регулируемом электроприводе.
Для синхронных двигателей, которые используются в основном для производственных механизмов с нерегулируемой скоростью движения, применение малоинерционного ротора не имеет практического смысла.
Рассмотрим теперь подробнее устройство малоинерционных двигателей постоянного и переменного тока, имеющих небольшую массу вращающейся части. Малоинерционные двигатели постоянного тока этого вида могут быть с цилиндрическим полым или дисковым якорем.
Двигатели с полым цилиндрическим якорем могут иметь электромагнитное возбуждение или возбуждение от постоянных магнитов. Во втором случае постоянные магниты могут располагаться на статоре двигателя или внутри якоря. Якорь двигателя выполняется, как правило, в виде тонкостенного стакана из немагнитного материала.
На рис. 9 показана принципиальная схема конструкции двигателя с полым цилиндрическим якорем и электромагнитным возбуждением.
Обмотка возбуждения 1 расположена на полюсах 2 магнитной системы, укрепленных на статоре 3 двигателя. Якорь 4 выполнен в виде полого пластмассового цилиндра, в который запрессованы проводники обмотки якоря. Ток к обмотке якоря подводится через коллекторно-щеточный узел 5. Внутри полого якоря размещен магнитопровод 6, который является частью магнитной системы двигателя и иногда называется внутренним статором. Как видно из приведенного рисунка, при такой конструкции вращается только цилиндр с обмоткой, масса которого невелика.
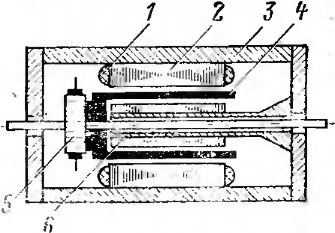
Рис. 9. Двигатель постоянного тока с полым цилиндрическим якорем.
Наряду с электромагнитным возбуждением в таких двигателях применяется возбуждение, осуществляемое с помощью постоянных магнитов. При этом магниты могут находиться как на внешнем статоре двигателя, аналогично тому, как это показано на рис. 9, так и на внутреннем. Во втором случае внешний статор выполняется из ферромагнитного материала и является частью магнитопровода.
Развитием и совершенствованием конструкции двигателя этого типа явилось изготовление якорей с так называемой печатной обмоткой. Такая обмотка (рис. 10,а) представляет собой систему из плоских медных проводников 1 небольшой толщины, расположенных на внутренней и внешней поверхности полого цилиндра 2, выполненного из изоляционного материала.

Рис. 10. Якорь с печатными обмотками, а — полый цилиндрический; б —дисковый.
Эти проводники наносятся на поверхность якоря специальным фотохимическим способом, откуда и произошло название печатной обмотки. Изоляцией между проводниками обмотки служат воздух и материал якоря. Концы обмотки подводятся к коллектору, как и в обычной конструкции двигателя постоянного тока.
Недостатком конструкции двигателя с полым якорем является наличие большого воздушного зазора на пути магнитного потока, что требует применения более мощной обмотки возбуждения двигателя. Это приводит к увеличению габаритов и массы двигателей, а в случае электромагнитной системы возбуждения — и к увеличению потерь энергии в цепи возбуждения. Однако эти недостатки малозначимы для двигателей небольшой мощности и компенсируются приобретением ими весьма ценных качеств. Основное из них — весьма малая инерционность его якоря. Другое положительное свойство определяется расположением проводников обмотки якоря практически в воздушном зазоре двигателя, а не в пазах магнитопровода. Такое расположение, как показывается в теории электрических машин, улучшает условия их охлаждения и коммутации, что позволяет повысить силу тока в проводниках якоря и снизить габариты и массу двигателя. Кроме того, улучшение коммутации увеличивает срок службы коллекторно-щеточного узла.
Таблица 1

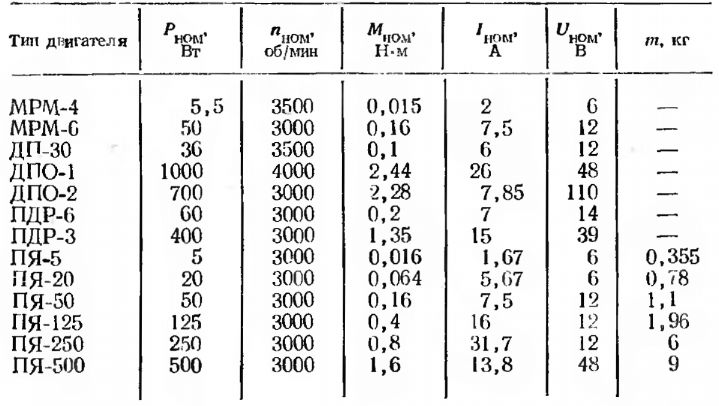
Отечественной электропромышленностью выпускается несколько серий двигателей постоянного тока с полым якорем [1]. В табл. 1 приведены технические данные двигателей серии ДПР на напряжение 27 В, при этом приняты следующие обозначения: РНом — номинальная мощность двигателя; nном — номинальная частота вращения; Мн0м, Iном — соответственно номинальные момент и ток двигателя; т — его масса.
Двигатели серии ДПР выпускаются также на напряжения 6 и 12 В. Возбуждение двигателей — от постоянных магнитов, расположенных на неподвижном статоре внутри полого якоря. Обмотка якоря — проводниковая. Двигатели этой серии имеют следующие конструктивные исполнения:
HI — нормальное исполнение с одним выходным концом вала;
Н2 — то же с двумя выходными концами вала;
Ф1—фланцевое исполнение с одним выходным концом вала;
Ф2 — то же с двумя выходными концами вала.
Каждый типоразмер предусматривает выполнение двигателя с различными номинальными данными — частотой вращения и напряжением питания.
Внешний диаметр двигателей лежит в пределах 15— 40 мм, а их длина не превышает 84 мм.
Таблица 2

В настоящее время разработана серия двигателей постоянного тока с полым цилиндрическим якорем, имеющим печатную обмотку. Эта серия имеет следующие модификации двигателей: ДПЦЯ — с электромагнитным независимым возбуждением; ДСПЯ —с электромагнитным последовательным возбуждением и ДМПЯ — с возбуждением от постоянных магнитов. Технические данные этих двигателей приведены в табл. 2, где даны также значения номинального напряжения (Лгом и момента инерции двигателя I.
Другим распространенным типом малоинерционного двигателя является двигатель с дисковым (торцевым) якорем. Такие двигатели, как показали некоторые теоретические исследования, целесообразно выпускать до мощности около 1—2 кВт, свыше этой мощности преимущества имеют двигатели с полым цилиндрическим якорем.
Двигатели постоянного тока с дисковым якорем имеют принципиальную конструкцию, показанную на рис. II.
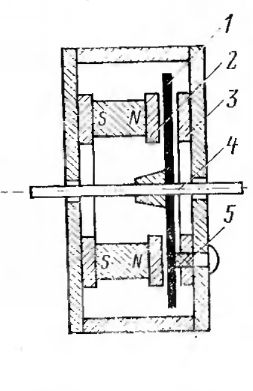
Рис. 11. Двигатель постоянного тока с дисковым (торцевым) якорем.
Основной особенностью этого двигателя является исполнение его якоря в виде плоского немагнитного диска I, на котором располагается, как правило, печатная обмотка. Такой дисковый якорь помещен в зазор магнитной системы двигателя, образованной полюсами электромагнита (или постоянного магнита) 2 и ферромагнитными кольцами 3. Диск с обмоткой укреплен на валу 4, который вращается в подшипниках двигателя. Ток к обмотке якоря двигателя подводится через щетки 5, которые скользят непосредственно по поверхности якоря.
На рис. 10,6 отдельно показан дисковый якорь двигателя с печатной обмоткой. Он обычно выполняется из текстолита или керамики и несет на себе печатную обмотку, наносимую на диск фотохимическим способом. Толщина диска в зависимости от мощности двигателя обычно колеблется в пределах от 0,5 до 2 мм, а толщина проводников обмотки — от 0,05 до 0,5 мм. Проводники обмотки якоря располагаются радиально по обе стороны диска и соединяются через отверстия в диске. Коллектором в таких двигателях чаще всего являются неизолированные участки проводников обмотки якоря, по которым скользят щетки, как это принципиально показано на рис. 11. Иногда применяется и коллектор обычной конструкции.
Конструкция с многодисковым якорем позволяет повысить мощность таких двигателей.
Двигатели с дисковым якорем обладают теми же отличительными свойствами, что и двигатели с цилиндрическим полым якорем: малой инерционностью вследствие небольшой массы якоря, улучшенными условиями коммутации и хорошим охлаждением проводников обмотки; эти свойства обеспечивают в конечном итоге высокое быстродействие таких двигателей. При этом характерная особенность их конструкции — плоская форма двигателя — оказывается весьма удобной для сочленения с некоторыми производственными механизмами или электрифицированными бытовыми приборами.
Разработано несколько типов двигателей постоянного тока с дисковым (торцевым) якорем, ориентировочные технические данные которых приводятся в табл.3.
Таблица 3
В системах автоматики наряду с малоинерционными двигателями постоянного тока широкое распространение получили и малоинерционные асинхронные двигатели, работающие как от сети переменного тока промышленной частоты 50 Гц, так и от источников повышенной частоты — 400 Гц и более. Известны асинхронные двигатели с полым цилиндрическим и дисковым роторами. Последний тип двигателя — с дисковым ротором — пока еще не получил широкого распространения.
Асинхронные двигатели с полым цилиндрическим ротором делятся на две группы: двигатели с немагнитным ротором и двигатели с. магнитным ротором. Наиболее широко выпускаются двигатели с полым немагнитным ротором. Конструктивная схема такого двигателя представлена на рис. 12.
Статор 1 двигателя, принципиально ничем не отличающийся от статора обычных асинхронных двигателей, набирается из листов электротехнической стали, и в его пазы укладываются обмотки переменного тока 2. Обычно такие двигатели имеют две сдвинутые в пространстве обмотки — возбуждения и управления.
На обмотку возбуждения подается напряжение сети, а на обмотку управления поступает сигнал (напряжение) управления, в функции которого осуществляется регулирование частоты и направления вращения двигателя.
Ротор 3 двигателя представляет собой тонкостенный немагнитный стакан с толщиной стенок от 0,2 до 1 мм, выполняемый обычно из сплавов алюминия. Ротор крепится на валу 5 двигателя, вращающегося в подшипниках.
Внутри ротора располагается неподвижный сплошной или шихтованный магнитопровод 4, который часто называют внутренним статором. Этот магнитопровод является частью магнитной системы двигателя и служит для уменьшения магнитного сопротивления потоку двигателя. Иногда обмотки возбуждения и управления располагают на внутреннем статоре, что делает конструкцию двигателя более технологичной.
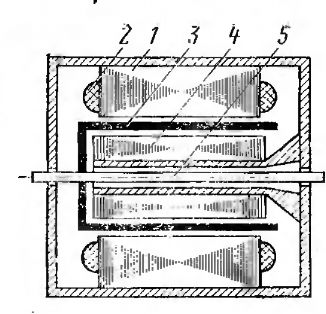
Рис. 12. Асинхронный двигатель с полым немагнитным ротором.
Конструктивная схема асинхронного двигателя с полым немагнитным ротором отличается важной специфической особенностью: воздушный зазор двигателя, складывающийся из двух зазоров между ротором и статорами двигателя и толщины немагнитного ротора, составляет 0,4—1,5 мм и существенно превышает воздушный зазор асинхронного двигателя обычной конструкции той же мощности. Наличие такого большого зазора приводит к снижению коэффициента мощности и коэффициента полезного действия, в силу чего Двигатели с полым ротором выпускаются в основном на небольшие мощности.
Отметим, что принцип действия асинхронных двигателей с полым немагнитным (и ферромагнитным) ротором тот же, что и у обычного асинхронного двигателя с массивным ротором: при подаче переменного напряжения на сдвинутые в пространстве обмотки возбуждения и управления возникает вращающееся магнитное поле, которое вызывает появление в роторе вихревых токов. Взаимодействие этих токов с магнитным полем двигателя приводит к появлению вращающего момента на его палу.
Таблица 4

Отечественная электропромышленность выпускает несколько серий асинхронных двигателей с полым немагнитным ротором. Технические данные этих двигателей [1] приведены в табл. 4, где п0 — частота вращения холостого хода, а (Iу и UB — соответственно номинальные напряжения обмоток управлении и возбуждения. Обозначения остальных величин — прежние.
Частота напряжения питания двигателей серии ДИД составляет 400 Гц. Частота напряжения питания двигателей АДП-1262 и АДП-1362 равна 50 Гц, остальных двигателей этой серии — 400 или 500 Гц. Внешний диаметр двигателей серии ДИД колеблется в зависимости
от мощности с пределах от 19 до 60 мм, а их длина — от 38 до 104 мм. Соответствующие размеры двигателей серии АДП составляют 50—108 и 87—183 мм.
На рис. 13 показана схема конструкции асинхронного двигателя с полым ферромагнитным ротором. Статор 1 двигателя с обмотками 2 ничем не отличается от внешнего статора двигателя с немагнитным ротором. Основная особенность конструкции двигателя заключается в исполнении ротора, который представляет собой полый ферромагнитный цилиндр 3 с толщиной стенок от 0,5 до 3 мм. Этот цилиндр крепится на валу двигателя с помощью двух специальных шайб (пробок) 4. Иногда применяется ротор с одной пробкой, которая в этом случае устанавливается посередине цилиндрического ротора.
Внутренний статор в таких двигателях отсутствует, так как магнитный поток, пройдя через воздушный зазор, замыкается по ферромагнитному ротору, выполняющему тем самым и роль части магнитопровода. По этой причине у двигателя с ферромагнитным ротором воздушный зазор оказывается меньше, чем у двигателя с немагнитным ротором, а коэффициенты мощности и полезного действия несколько выше. С другой стороны, масса ферромагнитного ротора больше массы немагнитного ротора, поэтому быстродействие двигателя с таким ротором оказывается ниже и применяются они реже, нежели асинхронные двигатели с полым немагнитным ротором.
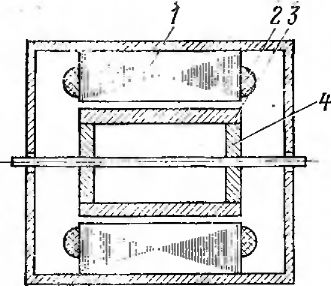
Рис. 13. Асинхронный двигатель с полым ферромагнитным ротором.
Перейдем к рассмотрению малоинерционных двигателей, у которых повышение быстродействия достигнуто увеличением длины ротора при одновременном снижении его радиуса или, другими словами, за счет увеличения отношения 1Iг. В настоящее время выпущено несколько серий двигателей этого типа, например рольганговые двигатели серии АР, двигатели для деревообрабатывающих станков серии AT, краново-металлургические двигатели постоянного и переменного тока и т. д.
Далее рассматриваются малоинерционные двигатели постоянного тока новой серии ПБСТ и ПС/Г [8]. Чаще всего двигатели этой серии применяются для привода рабочих органов различных станков, для которых требуются высокое быстродействие и большой диапазон регулирования скорости их движения.
Основными конструктивными особенностями двигателей являются увеличенная длина и уменьшенный внешний диаметр их якоря, что в соответствии с формулой (8) позволяет получать (при прочих равных условиях) их повышенное быстродействие.
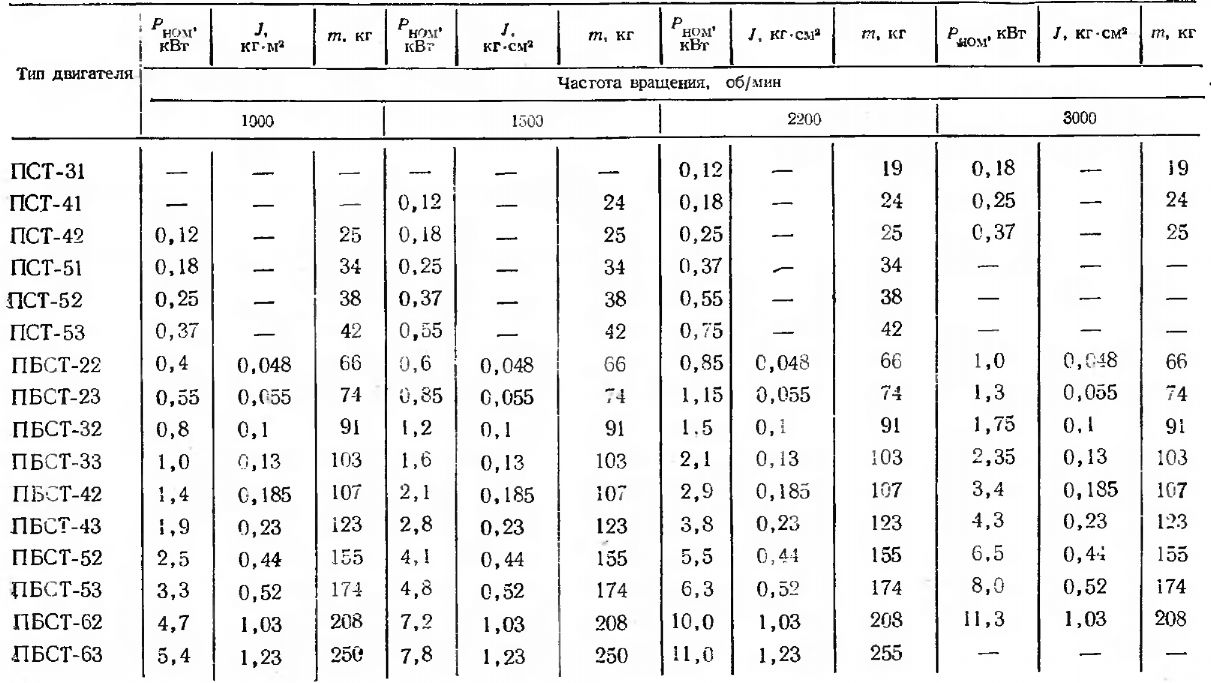
Мощность двигателей серии ПСТ в длительном режиме работы — от 0,12 до 0,75 кВт, номинальные частоты вращения—1000, 1500, 2200 и 3000 об/мин. Двигатели серии ПБСТ имеют те же номинальные частоты вращения и выпускаются на мощности от 0,56 до 17 кВт. Технические данные этих двигателей при напряжении сети 220 В для длительного режима работы приведены в табл. 5. Электродвигатели этих серий выпускаются и на напряжение 110 В постоянного тока.
Электродвигатели ПБСТ и ПСТ имеют независимое электромагнитное возбуждение от обмотки возбуждения 110 или 220 В. Помимо этого, двигатели имеют на статоре дополнительные полюсы, обмотка которых включается последовательно с обмоткой якоря. Дополнительные полюсы служат для улучшения условий коммутации тока.
Двигатели ПБСТ и ПСТ имеют естественное охлаждение и допускают регулирование частоты вращения в широких пределах, вплоть до 10 об/мин. При этом двигатели могут быть нагружены на номинальный момент. Двигатели этих серий допускают также работу с частотами вращения выше номинальных. Для двигателей на 3000 об/мин это превышение может быть в 1,2— 1,3 раза больше номинальной частоты вращения, для двигателей на 2200 об/мин — в 1,6—1,8 раза, а для двигателей на 1000 и 1500 об/мин — в 2,5—3 раза.
Двигатели обеспечивают изменение направления вращения (реверсирование) и допускают следующие перегрузочные режимы:
четырехкратную перегрузку по току при номинальном возбуждении в течение 10 с (при этом момент двигателя больше номинального в 2,5—3 раза);
двукратную (для номинального напряжения 110 В) и полуторакратную (для номинального напряжения 220 В) перегрузку по напряжению в течение 5 мин при номинальном возбуждении.
Таблица 5
Двигатели серий ПБСТ и ПСТ выпускаются со встроенными тахогенераторами постоянного тока. Сигнал тахогенератора обычно используется в схемах управления электродвигателем для получения требуемых характеристик электропривода, а также может быть подан на регистрирующий или показывающий прибор.
Для двигателей серии ПБСТ применяются тахогенераторы типа ПТ1, имеющие электромагнитное возбуждение от сети постоянного тока напряжением 55 В. Эти тахогенераторы выпускаются на 1500 и 3000 об/мин и имеют при таких частотах вращения выходное напряжение 230 В. Мощность тахогенератора составляет 15 Вт, а сопротивление обмотки якоря не превышает 140 Ом при частоте вращения 1500 об/мин и 40 Ом при частоте вращения 300 об/мин.
Для двигателей серии ПСТ тахогенераторы выпускаются с возбуждением от постоянных магнитов, мощность этих тахогенераторов 5 Вт. выходное напряжение 100 В, сопротивление якоря 200 Ом.
Тахогенераторы, используемые для двигателей ПБСТ и ПСТ, имеют пониженный уровень пульсаций выходного напряжения и прямолинейную характеристику от номинальной частоты вращения до 10 об/мин.
Двигатели серии ПСТ и двигатели 2-го и 3-го габаритов серии ПБСТ имеют изоляцию обмоток класса В, а двигатели 4—6-го габаритов серии ПБСТ — изоляцию класса F.
Двигатели этих серий изготовляются в следующих исполнениях: М101 (горизонтальное с лапами на станине); М211 (горизонтальное с лапами на станине и фланцем); М361 (горизонтальное с фланцем и станиной без лап); М362 (вертикальное с фланцем).