Фильтры симметричных составляющих на основе пассивных элементов обладают рядом существенных недостатков: имеют большое потребление мощности, большие габариты, сложны в настройке и т. д. Применение активных элементов, в частности операционных усилителей (ОУ) на основе интегральных микросхем, позволяет значительно повысить технико-экономические показатели фильтров. Кроме того, это направление хорошо согласуется с современной тенденцией широкого внедрения микроэлектроники в технику РЗ.
Основные принципы выполнения ФСС на основе ОУ достаточно подробно описаны, например, в [5]. При проектировании ПДЗ на основе ОУ с учетом требований к обеспечению правильного функционирования в широком диапазоне изменения входных сигналов в переходных режимах, а также требований к достаточной простоте схемы, помехоустойчивости и т. д., возникают вопросы, связанные с выбором рациональных решений и конкретным исполнением ФСС.
Как известно [5], в основу построения ФСС с применением операционных усилителей положено моделирование известных выражений для симметричных составляющих токов прямой и обратной последовательностей:
 (2.31)
(2.31)
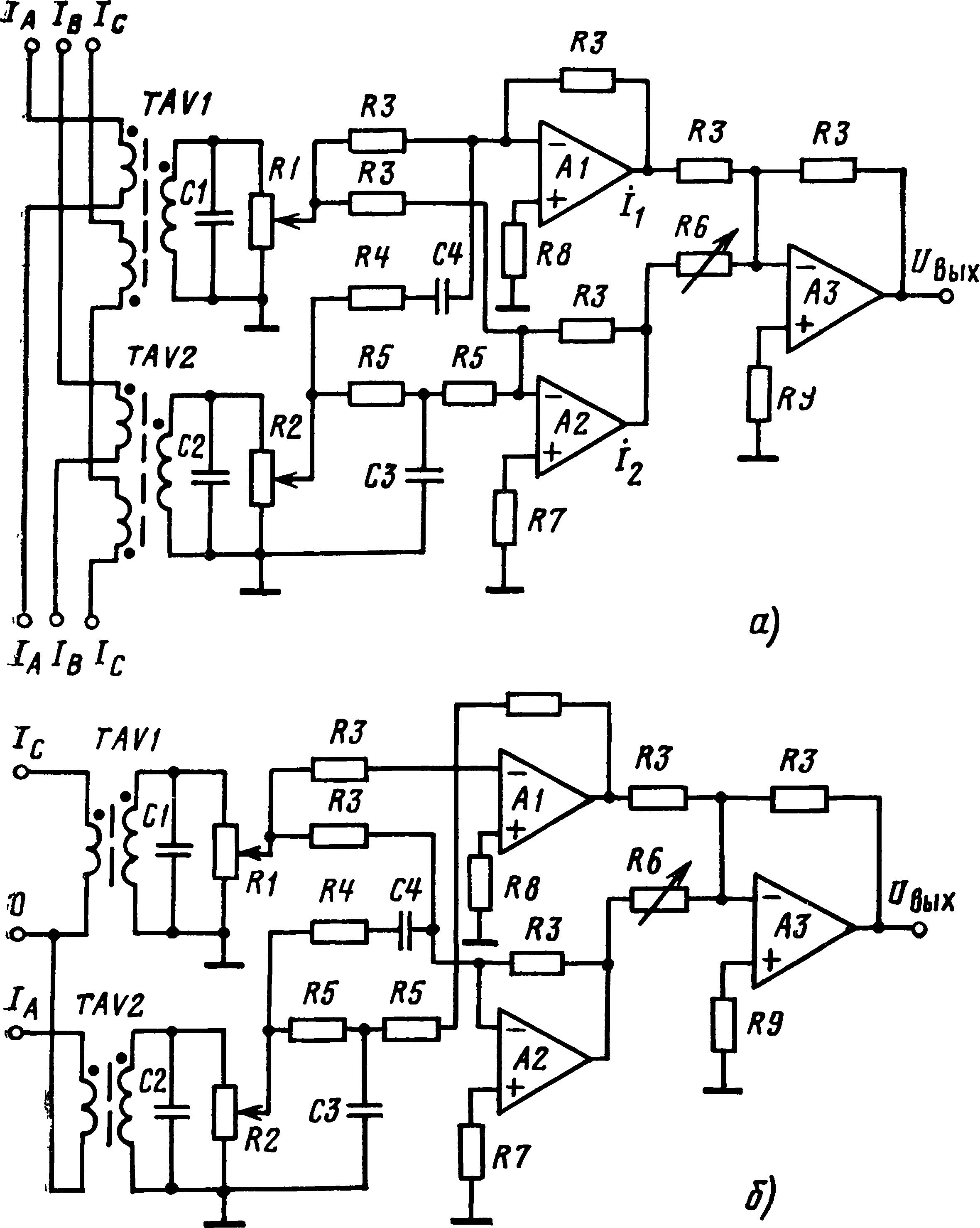
Рис. 2.19. Принципиальные схемы фильтров симметричных составляющих для сетей с большим (а) и малым (б) токами замыкания на землю
При построении практических схем необходимо знать допустимый динамический диапазон изменения входных сигналов фильтра, который будет определяться отношением m=Iк/Iном, т. е. кратностью тока КЗ. Верхняя граница динамического диапазона определяется напряжением насыщения Us ОУ, нижняя граница зависит в основном от помех на входе ОУ.
Для режима максимальной нагрузки защищаемой линии напряжение на выходе фильтра равно напряжению прямой последовательности:
![]() (2.34)
(2.34)
где Iном — номинальный ток; Iсраб* = Iсраб/Iном— относительный ток срабатывания ПДЗ; β — коэффициент пропорциональности, причем Ubx=βIκ; Uтin—k3Uсм — минимальное значение входного сигнала; UCK — напряжение смещения нуля ОУ; k3 — коэффициент запаса, k3= 1,1-:-1,2.
При несимметричных КЗ имеет место максимальный выходной сигнал фильтра, который в основном определяется составляющей обратной последовательности:
![]() (2.35)
(2.35)
Динамический диапазон входных токов фильтра из (2.36) и (2.35) равен
![]() (2.36)
(2.36)

Рис. 2.20. К определению динамического рабочего диапазона фильтра I1+k2I2
При использовании схем, содержащих формирователи прямоугольных импульсов (ФПИ), для достижения угловой погрешности формирователя δф≤5 необходимо выполнить условие Umin/Ucm=20, откуда следует, что при UCM= = 10-2 минимальное значение входного сигнала Umin≈0,2 В. На рис. 2.20 приведены зависимости m(k2) для различной чувствительности ПДЗ, где принято Us=10 В, Uсм=10-2 В, что соответствует наиболее распространенным сериям отечественных ОУ: К140, К153, К553. Анализ зависимостей на рис. 2.20 показывает, что для ПДЗ, работающих без ограничения рабочего сигнала (например, [12]), динамический диапазон фильтра явно недостаточен и при наиболее часто используемом значении k2=6 и Iсраб*=1 не превышает 6. Защиты с такими фильтрами могут применяться лишь на сильно нагруженных линиях с малыми уровнями токов КЗ.
Для ПДЗ, работающих с ограничением рабочего сигнала на уровне Когр=Iк/Iсраб=m/Iсраб*=2,5-:—3, фильтры на ОУ могут с успехом
применяться, однако чувствительность ПДЗ не может быть выше Iсраб*=0,5, так как при Iсраб*=0,5 и k2=10 kогр=3.
Для ПДФЗ, сравнивающей только фазы токов, динамический диапазон может быть существенно выше, так как амплитуда сигнала не имеет значения, а важны лишь моменты перехода входного тока через уровень формирования ФПИ.
Важное значение в схемах ФСС, использующих ОУ, приобретает вопрос о точности реализации заданной передаточной функции. Источниками погрешности могут быть как конечные значения входного сопротивления и коэффициента усиления ОУ, так и разброс параметров элементов, входящих в схему. Отклонение параметров реального и идеального ОУ может приводить к появлению на выходе ФСС постоянной составляющей напряжения того или иного знака, обусловленной наличием начального напряжения смещения нуля (Uсм), его дрейфом (Uдр1), различием входных токов (Iвх1, Iвх2) и (ΔIвх) и их дрейфом (1Uдр2). Некоторое снижение указанных составляющих достигается при выравнивании входных сопротивлений ОУ подключением к неинвертирующему входу дополнительного симметрирующего сопротивления R7, R8 и R9 (рис. 2.19).
Операционные усилители в интегральном исполнении имеют высокие входное сопротивление (не менее 200 кОм) и коэффициент усиления (не менее 10 000), погрешность от конечных значений которых не превышает 0,5 %. Основная составляющая погрешности определяется разбросом параметров элементов относительно номинальных значений. Известные ограничения технологии серийного производства практически исключают операции подгонки, поэтому необходимо применение значительного количества регулирующих средств, что усложняет эксплуатацию и надежность устройств.
Для оценки погрешности выходной величины КФСС из-за отклонения параметров элементов от номиналов, в [25] использован метод статистического моделирования на цифровой ЭВМ (метод Монте-Карло), с помощью которого исследовалась точность схемы, представленной на рис. 2.19, в режиме трехфазного КЗ. Распределение параметров всех элементов схемы принималось нормальным.
В результате исследования было установлено, что с изменением допусков на параметры элементов схемы линейно меняются погрешность модуля выходного напряжения и его фазовый сдвиг. Их значения соответственно равны 2,25 и 1,38 % на процент допуска.
Таким образом, для получения приемлемых значений погрешностей выходного напряжения КФСС необходимо применение элементов с малыми допусками (не хуже 1 %). Это позволит отказаться от регулировки фильтра в процессе настройки.
Для оценки влияния переходных процессов на работу ПДЗ рассмотрено поведение активных ФСС при искаженной форме входного сигнала методом физико-математического моделирования, так как структура фильтра, выполненного на ОУ, органически согласуется со структурной схемой моделирования на аналоговой ЭВМ. Комбинированный метод моделирования обеспечивает более полное представление о поведении исследуемых ФСС, так как реально существующие ФСС отличаются от своей математической модели.
Моделирование было проведено как для предельных, так и для наиболее вероятных значений исходных данных. Угловая погрешность в этих условиях не превышала 35— 40°, что указывает на возможность построения селективной ПДФЗ с активными ФСС.