
В основе работы электродвигателей переменного тока используется явление вращающегося магнитного поля. Вращающееся магнитное поле образуется в результате наложения двух и более магнитных полей, сдвинутых друг относительно друга по фазе и в пространстве. Для доказательства существования вращающегося магнитного поля построим картину магнитного поля для нескольких моментов периода трехфазного переменного тока (рис. 28).
В момент времени t = 0 (рис. 28, а) ток в фазе А равен нулю и фаза не создаст магнитного поля. Намагничивающие силы, создаваемые токами фаз В и С, равны по величине. Ток фазы С, как положительный, направлен от начала к концу обмотки и создает вектор индукции Вс; ток фазы В, как отрицательный, направлен от конца к началу обмотки и создает вектор индукции Вb. В сумме получается результирующий вектор (рис. 28, а). Картина магнитного поля и векторная диаграмма индукций показаны на рис. 28, б.
Как видно из векторных диаграмм, амплитуда результирующего поля Bр, полученная сложением индукций отдельных фаз, в 1,5 раза больше амплитуды одной фазы. За время Т/3 (2π/3) результирующий вектор поворачивается па угол 120°, оставаясь неизменным по величине; за время одного периода поле поворачивается на 360° (2 л), т. е. делает полный оборот.
Подвижная часть электродвигателей (как и других исполнительных механизмов, устройств) может следовать за вращающимся магнитным полем асинхронно (несовпадающий во времени) или синхронно (совпадающий во времени). В зависимости от этого электродвигатели разделяют на асинхронные и синхронные.
Принцип работы асинхронного двигателя основан на том, что вращающееся магнитное поле, пересекая проводники обмотки, наводит в них ЭДС, пропорциональную скорости вращения поля (е = —Βlυ). Под действием этой ЭДС в проводниках возникает ток. При взаимодействии этого тока с вращающимся магнитным полем создаются силы, приложенные к проводникам. Суммированное действие сил и создает вращающий момент на валу двигателя.
Как видно из рис. 28, а, вращающий момент двигателя совпадает с направлением вращения магнитного поля.

Частота вращения поля п пропорциональна частоте сети и для двухполюсной машины равна 60, что при частоте 50 Гц. соответствует 3000 мин-1. При числе пар полюсов р частота вращения обратно пропорциональна числу пар полюсов, т. е. п= 60f/p.
Рис. 28. К пояснению вращающегося магнитного поля (a, б) и зависимость момента на валу двигателя от скольжения (в)
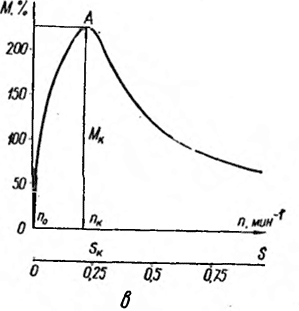
Зависимость вращающего момента двигателя от скольжения М = f (s) или частоты вращения М = f (n) показана из рис. 28, в. Момент двигателя также пропорционален квадрату напряжения M= U, поэтому незначительное колебание напряжения в сети вызывает резкое изменение вращающего момента. Для защиты асинхронных двигателей от коротких замыканий и тока перегрузки применяют плавкие предохранители и автоматические выключатели (см. гл. V.4).
Асинхронные двигатели (рис. 29) могут быть трех- и однофазные. Благодаря своей конструктивной простоте эти двигатели (особенно трехфазные) широко применяются во всех областях народного хозяйства.
Двигатель асинхронный короткозамкнутый (рис. 29, а) состоит из двух основных частей: неподвижного статора 2 и подвижного ротора 1.
Статор набирают из цельных листов электротехнической стали, выштампованных таким образом, что образуется полый цилиндр, на внутренней части которого имеются пазы 3. В эти пазы укладывается обмотка статора 6. Ротор набирают также из стальных листов, но имеющих пазы 4 по наружному диаметру. В пазы ротора заливается алюминий, который образует короткозамкнутую обмотку 5, называемую «беличьей клеткой».

Рис. 29. Асинхронный двигатель
Электродвигатели с фазным ротором применяются в тех случаях, когда необходимо обеспечить плавный пуск и регулировать частоту вращения. Двигатель с фазным ротором отличается от короткозамкнутого двигателя конструкцией ротора. У двигателя с фазным ротором в пазы ротора 4, как и статора, закладывают обмотки. Роторная обмотка соединяется по схеме «звезда», выводы подсоединяют к контактным кольцам 7 (рис. 29, б). Кольца изолируют друг от друга и от вала, на котором они располагаются. К ним через щеточный механизм 8 можно подключать дополнительное сопротивление 9. При пуске это сопротивление вводится в цепь ротора для ограничения пускового тока. Его можно использовать и для регулирования частоты вращения двигателя, но в этом случае оно должно быть рассчитано на длительную работу.
Рис. 30. Расположение выводов двигателя на щитке подключения
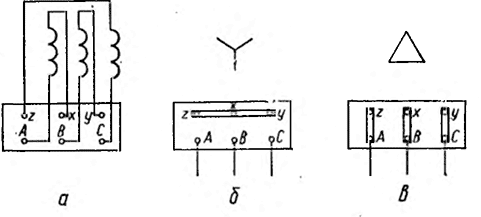
Начала и концы обмотки статора выводятся на щиток (рис. 30, а). Так как номинальное напряжение двигателя должно быть равно номинальному напряжению сети, то в зависимости от величины питающего напряжения обмотку статора соединяют в звезду или треугольник (рис. 30, б, в). Если линейное напряжение сети, к которой присоединяется двигатель, равно номинальному фазному, то обмотка статора соединяется треугольником, а если линейное напряжение сети в √3 больше фазного напряжения двигателя,— звездой.
Различают прямой пуск асинхронного двигателя (непосредственное включение в сеть) и через токоограничительное сопротивление. Прямой пуск осуществляется через рубильник Р. и силовые контакты пускателя СК (рис. 31, а). Схема управления получает питание от верхних неподвижных контактов пускателя, где после включения рубильника Р всегда (при исправных предохранителях Пр1) есть напряжение. При включении кнопки «пуск» (КнП) подается питание па катушку КП пускателя. Магнитный поток катушки, замыкаясь через подвижное ярмо, притягивает его. Вместе с ярмом перемещаются и подвижные контакты, которые замыкают силовую цепь (замыкаются контакты СК). В это же время замыкается и блок-контакт БК, Который блокирует кнопку «пуск». Для отключения двигателя разрывают цепь катушки пускателя кнопкой «стоп» (КнС) или контактами КР теплового реле РТ, когда двигатель длительно перегружается.
Если двигатель работает по схеме «треугольник», то уменьшить пусковой - ток можно, включив его на период пуска по схеме «звезда». В этом случае напряжение на каждой фазе статора снижается в √3 раз, пусковой момент — примерно в 3 раза.
Ограничения тока при пуске двигателя можно добиться включением его через дроссель ДР (рис. 31, б). При пуске замыкают рубильник Р1 и пусковой ток ограничивается дросселем. После окончания пуска замыкают рубильник Р2, шунтирующий дроссель. Аналогичную схему можно выполнить с активными сопротивлениями, которые включают вместо дросселей.
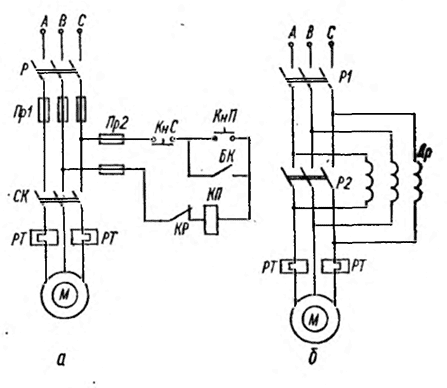
Рис. 31. Прямой пуск асинхронного двигателя (а) и пуск через реакторы (б)
Направление вращения асинхронного двигателя зависит от последовательности фаз, т. е. от порядка прохождения положительных максимумов токов и напряжений в трехфазной системе. При прямой последовательности максимумы наступают поочередно в фазах А, В, С, при обратной — в фазах А. С, В. Изменяют направление вращения двигателя (реверс двигателя) изменением последовательности чередования фаз. На практике для этого обычно переключают два провода питания.
В двигателях с фазным ротором пусковой ток можно также снизить, введя в цепь ротора пусковое сопротивление.
Нашей промышленностью выпускаются асинхронные двигатели с улучшенными пусковыми свойствами: с двойной «беличьей клеткой» и с глубоким пазом. Эти двигатели применяют там, где условия пуска тяжелые, но по техническим причинам желательно применять асинхронные двигатели и с коротко- замкнутым ротором.
Все асинхронные двигатели делятся на группы; до 100 кВт, от 100 до 1000 кВт и свыше 1000 кВт. Государственными стандартами установлены серии и габариты электродвигателей в пределах каждой группы. Серии защищенных асинхронных двигателей имеют следующие обозначения; А — в чугунной оболочке; АО — обдуваемые в чугунной оболочке; АОЛ — обдуваемые в алюминиевой оболочке; АН — в чугунной оболочке нормального исполнения; АТД — защищенные обдуваемые; ВДД — вертикальные с двойной клеткой; ДАЗО— обдуваемые.
Асинхронные двигатели подразделяются на 12 габаритов. Вместо серий А, АО, АОЛ мощностью до 1000 кВт (до 9-го габарита включительно) выпускаются двигатели серий А2, АО2, АОЛ2, имеющие улучшенные технико-экономические показатели при тех же габаритах. Серия ДАЗО заменяется двигателями единой серии АО. После буквенного обозначения серии записаны цифры габарита (условное обозначение наружного диаметра статора); условное обозначение длины сердечника статора и число полюсов двигателя. Например, АО-12-36-4 обозначает асинхронный двигатель серин АО, 12-го габарита, 36-й длины, четырехполюсник.
Синхронные трехфазные двигатели применяют в установках средней и большой мощности при сравнительно редких пусках, когда требуется постоянная и неизменная скорость вращения приводного механизма. Принципиальное отличие синхронного двигателя от асинхронного заключается в том, что в обмотку ротора через контактные кольца подается постоянный ток, называемый т о к о м возбуждения. Этот ток создает магнитный поток, образующий поле, подобное полю постоянных магнитов. При подключении обмоток статора к трехфазной сети переменного тока в ней образуется вращающееся магнитное поле, имеющее такое же количество пар полюсов, как и ротор. На рис. 32 вращающееся магнитное поле заменено вращающимся кольцевым постоянным магнитом. Если предварительно разогнать ротор до скорости п, близкой к синхронной, а затем подать ток возбуждения, то поля постоянных магнитов ротора и статора, вращающиеся с одинаковой (подсинхронной) скоростью, сцепляются, образуя общее поле. Машина втягивается в синхронизм и работает при синхронной скорости.

Рис. 32. К пояснению принципа работы синхронного двигателя
Рис. 33. Пуск синхронного двигателя с включением на сопротивление
Обычно на практике применяют асинхронный пуск синхронного двигателя. Для этого на роторе, кроме обмотки возбуждения, располагают пусковую обмотку, выполненную из стержней, уложенных в пазах полюсных наконечников. Стержни с торцов замыкаются сегментами накоротко, образуя обмотку, подобную короткозамкнутой обмотке ротора асинхронного двигателя. При пуске синхронного двигателя (рис. 33) обмотка ротора с помощью переключателя П включается на пусковое сопротивление rп. Обмотка статора ОС подключается к сети трехфазного переменного тока, и пуск происходит так, как у асинхронного двигателя. Когда ротор достигает скорости, близкой к синхронной, в его обмотку подается постоянный ток переключателем П. Двигатель входит в синхронизм и работает как синхронный.
Изменяя ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности — доводить до 1 и даже придавать ему емкостной характер. Так как все основные нагрузки предприятий (асинхронные двигатели, трансформаторы) имеют активно-индуктивный характер, то емкостный cos φ используется для улучшения коэффициента мощности подключенных к данной сети потребителей. Это — основное преимущество синхронного двигателя перед асинхронным. Другое важное преимущество — более высокий КПД из-за меньших потерь в обмотках ротора и статора при высоком коэффициенте мощности (cos φ).
Серии синхронных электродвигателей СД имеют следующие обозначения: СДЗ — закрытые; СДН — нормального исполнения; СДНЗ — нормального исполнения закрытые.