ИСПЫТАНИЯ НА ДЕЙСТВУЮЩЕЙ ГЭС СИСТЕМЫ ГРАМ, ВЫПОЛНЕННОЙ НА БАЗЕ МИКРО-ЭВМ
Киселев Г. С., Ляткер И. И., кандидаты техн. наук, Жихарев Г. Л., Завацкий А. Г., инженеры
Союзтехэнерго — ВЭИ
Групповое регулирование активной мощности (ГРАМ) гидроагрегатов, возникнув вначале для решения частной задачи по уравниванию нагрузки между астатически настроенными регуляторами скорости, решает в настоящее время целый ряд задач по обеспечению эффективного участия ГЭС в регулировании частоты и активной мощности в энергосистеме. Развитие системы ГРАМ происходило по разным направлениям, из которых можно выделить три основные: со схемой уравнивания нагрузок; с центральным регулятором; с оптимизацией распределения нагрузки между агрегатами (схема ВНИИЭ) [1].
В условиях несовершенства регуляторов скорости, особенно гидромеханических, очень четко проявились преимущества систем ГРАМ с центральным регулятором, которые и получили преимущественное развитие. В настоящее время подавляющее большинство систем ГРАМ выполнено с центральным регулятором, наличие которого обеспечивает удобство в изменении динамических и статических свойств всей системы ГРАМ. Регулятор скорости используется в данной схеме таким образом, что он практически не оказывает влияния на динамические свойства системы ГРАМ в целом.
Использование микро-ЭВМ в системах ГРАМ открывает самые широкие возможности в части совершенствования функций группового регулирования. Одной из новых функций ГРАМ является оптимальное распределение нагрузки между агрегатами, которое может быть реализовано с помощью микро-ЭВМ [2]. В отличие от аналоговых систем ГРАМ с центральным регулятором в этом случае каждому агрегату должна задаваться активная мощность. При отсутствии в регуляторе скорости схемы отработки задания по активной мощности регулятор мощности должен быть выполнен программным способом, т. е. с помощью микро-ЭВМ.
В аналоговых системах ГРАМ в качестве регулятора мощности используется центральный регулятор либо с ПИ-законом регулирования (КТС ГРАМ), либо с пропорциональным регулированием и интегральной коррекцией (ЦЗАН). В обоих случаях осуществляется параметрическое (напряжение постоянного тока) управление регулятором скорости, выполняющего в большинстве случаев функции следящей системы.

Рис. 1. Схема ввода управляющих воздействий от ГРАМ в ЭГР
В микро-ЭВМ может быть программно реализован аналогичный регулятор мощности как в целом для ГЭС, так и для каждого агрегата в отдельности. Может быть реализовано и параметрическое управление. Не отвергая окончательно этих принципов построения системы группового регулирования, было признано целесообразным из условий повышения надежности реализовать управление регуляторами скорости с помощью импульсов, формируемых в микро-ЭВМ. При импульсном управлении регулятором скорости его схема остается неизменной как в режиме индивидуального, так и группового регулирования, что является одним из основных преимуществ такого способа управления. Реализация импульсного регулирования становится возможной благодаря значительному усовершенствованию регуляторов скорости в сравнении с теми, для которых было обосновано их использование лишь в качестве следящей системы в ГРАМ с центральным регулятором.
На начальной стадии работ было исследовано регулирование с помощью ПД-регулятора, воздействующего на интегрирующий привод механизма изменения мощности (МИМ) регулятора скорости через широтно-модулированный сигнал [3]. Однако не во всех случаях такой способ управления позволял получить приемлемые по динамике результаты, например, при регулировании частоты. Поэтому в дальнейшем было применено времяимпульсное управление, при котором длительность импульса пропорциональна приращению задания. Испытания в лабораторных условиях регулятора мощности при таком способе импульсного управления показали, что при отработке ступенчатого воздействия он обладает практически тем же быстродействием, что и ПИ-регулятор. Однако очень важно было проверить действие регулятора на реальном агрегате при наличии существенных нелинейностей типа люфта, мертвой зоны, кривизны мощностной характеристики агрегата и др.
Испытания микропроцессорной системы ГРАМ с использованием микро-ЭВМ В-7 были проведены на трех агрегатах Волжской ГЭС им. XXII съезда КПСС, которые в данном случае представляли трехагрегатную ГЭС. Агрегаты ГЭС с гидротурбинами поворотно-лопастного типа снабжены электрогидравлическими регуляторами с электропанелью типа ЭГР и модернизированной колонкой гидромеханического регулятора типа РКО- 250. Программой модернизации Волжской ГЭС предусмотрена замена турбинного оборудования с установкой регулятора типа ЭГР-2И-1, в котором в качестве МИМ используется статический интегратор. Учитывая, что система ГРАМ должна быть ориентирована на этот тип регулятора, для управления регулятором ЭРГ была применена схема управления со статическим интегратором (рис. 1). Выход интегратора через усилитель воздействовал непосредственно на сетку электронной лампы; при этом сигнал от выявительной части регулятора блокировался замыканием выхода фазочувствительного выпрямителя через делитель напряжения на общую точку схемы. На второй вход усилителя подавался сигнал обратной связи по открытию направляющего аппарата от потенциометра П704, движок которого связан с валом выключателя регулятора скорости.

Регулятор скорости в режиме группового регулирования при выведенной изодромной обратной связи представляет следящую систему, аналогичную имеющейся в регуляторе ЭГР-2И-1 при задании мощности. Точность и постоянная времени следящей системы могут изменяться путем изменения коэффициента усиления усилителя. Золотниковая система регулятора РКО-250 не позволяет получить тех же показателей качества следящей системы, что и в современных регуляторах. При коэффициенте усиления, равном 1,0, постоянная времени составляла 1,5 с и мертвая зона 1—2 % по открытию направляющего аппарата. На одном из агрегатов опыты производились при коэффициенте усиления, равном 4,0, что позволило улучшить качество следящей системы.
Гидротурбина, как объект регулирования мощности, имеет нелинейную статическую характеристику с петлей гистерезиса. Коэффициент передачи ее по мощности в зависимости от диапазона регулирования меняется от 0,6 до 2,0. Петля гистерезиса на разных агрегатах составляет величину от 2,0 до 5,3 %.
В программном обеспечении ГРАМ было предусмотрено два возможных способа регулирования мощности: с помощью времяимпульсного управления и с помощью ПИ-регулятора. При времяимпульсном управлении любому приращению задания мощности соответствует вполне определенная длительность импульса, определяемая как ΤΜΔΡ, где Тм — время перемещения МИМ, соответствующего 100 %-ному изменению мощности; ΔΡ — приращение задания мощности в относительных единицах за один машинный цикл. Поскольку регулятор скорости имеет обратную связь по ходу сервомотора, а не по мощности, то из-за нелинейности мощностной характеристики агрегата величина Тм будет зависеть от открытия направляющего аппарата. Так, для агрегата Г-10 в диапазоне мощностей, в котором проводились испытания, Тм изменялось от 35 с до 60 с.
Учитывая нелинейную зависимость Тм от мощности, для точной отработки мощности вводится интегральная коррекция по мощности. Для этого через интервалы времени Тц производится измерение разности между заданной и фактической мощностью и по среднему за несколько измерений значению разности подается корректирующий импульс. Через пульт микро-ЭВМ можно оперативно изменять расчетное время Тм, продолжительность цикла и коэффициент пересчета разности мощностей в корректирующий импульс. При ПИ-регулировании приращение выхода регулятора за каждый машинный цикл пересчитывалось в длительность импульса. Оперативно изменялись коэффициент передачи и постоянная времени интегрирования.
Исследование влияния параметров настройки регулятора мощности на качество процесса регулирования проводилось поочередно при регулировании мощности одного агрегата. Процессы регулирования на разных агрегатах при одинаковых на стройках времяимпульсного регулирования несколько отличны между собой из-за различий в мертвых зонах регуляторов и скоростных характеристиках сервомоторов направляющего аппарата и рабочего колеса. Во всех опытах подавалось ступенчатое изменение задания мощности величиной 10 %.
При наличии мертвой зоны следящей системы (порядка 2 %) скорость отработки задания мощности в существенной степени зависит от величины первого импульса, определяемого расчетным значением Тм. Если величина Тм не соответствует фактической крутизне мощностной характеристики агрегата, то первого импульса, часть которого идет на выбор мертвой зоны, оказывается недостаточно для отработки заданной мощности. В этом случае время переходного процесса в основном определяется действием интегральной коррекции.
На рис. 2, а, б представлены процессы при одинаковом значении Тм, но с разным временем цикла опроса мощности. Можно заметить, что при первом задании на уменьшение мощности за счет мертвой зоны первый импульс практически не приводит к изменению мощности, в то время как при последующем изменении задания в ту же сторону мощность изменяется после первого импульса. Это происходит из-за того, что при апериодическом переходном процессе по завершении отработки мощности мертвая зона сказывается уже выбранной. При уменьшении цикла опроса мощности с 3 с до 2 с время переходного процесса уменьшается (рис. 2, б, в).
При соответствии расчетного времени Тм фактическому времени изменения мощности время переходного процесса существенно уменьшается. Неполная отработка мощности за один импульс возможна в этом случае из-за влияния мертвой зоны. На рис. 2, в приведены процессы, в которых большая часть задания отрабатывается за первый импульс, однако при изменении направления задания в силу влияния мертвой зоны часть импульса затрачивается на выбор мертвой зоны и время переходного процесса затягивается.
Улучшение показателей следящей системы (уменьшение мертвой зоны и инерционности) приводит к улучшению динамических показателей переходного процесса регулирования мощности. При коэффициенте усиления усилителя следящей системы, равном 4,0, время переходного процесса регулирования мощности составляет 9—10 с (рис. 3, а). Практически такие же процессы получаются и при ПИ-регулировании (рис. 3, б).
При испытаниях выявлено, что при ПИ-регулировании влияние на качество переходного процесса мертвой зоны и крутизны мощностной характеристики агрегата сказывается в меньшей степени, чем при времяимпульсном регулировании с интегральной коррекцией. Вместе с тем испытания показали, что динамические свойства системы импульсного регулирования вполне обеспечивают выполнение требований по быстродействию, предъявляемых к системе ГРАМ.

Рис. 3. Переходные процессы регулирования мощности:
а — с времяимпульсным регулированием Тм=80 с, Тц=2 с; б — с ПИ-регулятором, Кп=0,5, Ти=5 с
Если при подаче ступенчатого воздействия на вход следящей системы время переходного процесса изменения мощности составляет 6—7 с, то при отработке ступенчатого задания мощности ГРАМ с помощью импульсного регулирования оно составляет 9—10 с.
В современных условиях работы ГЭС в энергосистеме наиболее высокие требования по быстродействию предъявляются к системе ГРАМ системным регулированием частоты и мощности (АРЧМ) и в некоторых редких случаях регулированием частоты в изолированном энергорайоне. Из условия ограничения перетоков мощности требуется отрабатывать задание мощности с постоянной времени 10—40 с, как это определено в последней редакции технических требований к ГРАМ [4]. В данном случае постоянная времени составляет 3—4 с.
Регулирование частоты в изолированном энергорайоне является хотя и редким, зачастую аварийным режимом работы ГЭС, но тем не менее система ГРАМ должна обеспечивать устойчивое регулирование частоты. Поскольку ВО ГЭС не выделяется на изолированный энергорайон, были проведены опыты по регулированию частоты при работе агрегата в энергосистеме. При этом сигнал с преобразователя мощности агрегата подавался в аналоговую модель изолированного энергорайона, что позволило имитировать условия регулирования частоты с реальной системой регулирования и реальным гидроагрегатом.
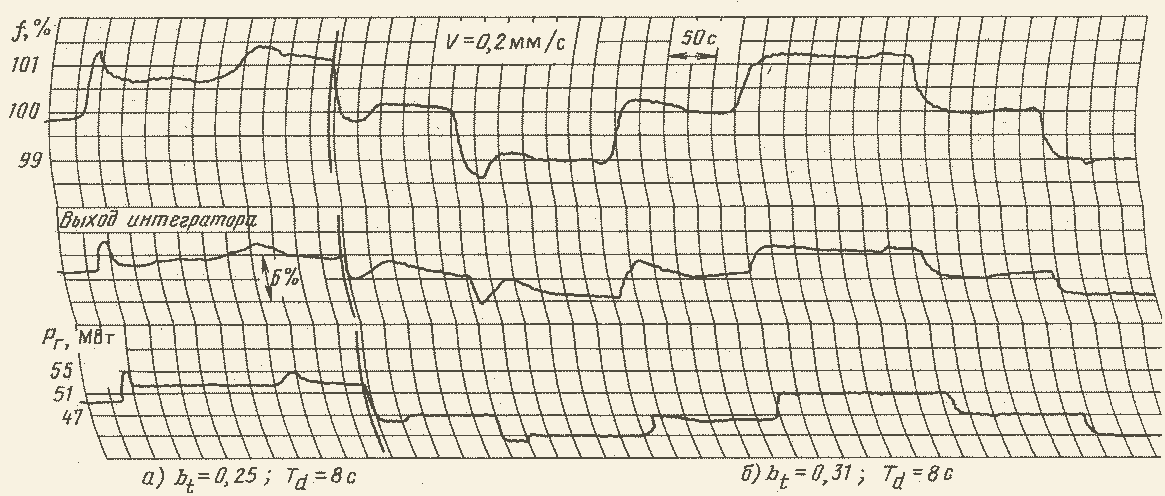
Рис. 4. Переходные процессы регулирования частоты при работе агрегата на модель изолированной энергосистемы при различных настройках ГРЧ
На рис. 4 приведены переходные процессы регулирования частоты при ступенчатом изменении уставки частоты на 1 %. Поскольку выявительная часть регулятора скорости была отключена, регулирование частоты осуществлялось с помощью группового регулятора частоты (ГРЧ), программное обеспечение которого позволяло получить как ПИ-, так ПИД-регулирование. Было проверено, что при изменении настроек ГРЧ можно получить переходные процессы регулирования частоты различного вида (как апериодические, так и колебательные), что свидетельствует о возможности устойчивого регулирования частоты в изолированном энергорайоне.
После проверки динамических свойств регулирования мощности были проведены типовые испытания системы ГРАМ при подключении к ней от одного до трех агрегатов. Эти испытания имели своей целью проверку правильности принятых алгоритмов и функционирования ГРАМ в различных переходных режимах: при подключении агрегата к ГРАМ и его отключении; при пуске и останове агрегата; при разделении ГЭС на две секции и их объединении.
Было также проверено действие автоматического отключения агрегата от ГРАМ в том случае, если на нем не отрабатывается заданная мощность. Для этого ограничителем открытия производилось снижение мощности агрегата в сравнении с заданной. Через некоторое время агрегат отключался от ГРАМ и происходило перераспределение нагрузки между агрегатами.
На рис. 5 приведен один из переходных процессов регулирования мощности трех агрегатов из которого видно, что хотя установившиеся значения мощности агрегатов практически равны, динамика процесса регулирования мощности на каждом из агрегатов различна. Это объясняется различием динамических свойств регуляторов скорости, которые из-за ограниченности времени подготовки к испытаниям не подвергались никакой предварительной настройке.

Рис. 5. Переходные процессы регулирования мощности трёх агрегатов
ВЫВОД
Испытания на действующей ГЭС системы ГРАМ, выполненной на базе микро-ЭВМ типа В-7, с полной очевидностью подтвердили достаточно высокие динамические свойства время- импульсного регулирования мощности с воздействием на механизм изменения мощности регулятора скорости. Подтвердили правильность функционирования ГРАМ в установившихся и переходных режимах, а также возможность использования программного обеспечения для более длительной эксплуатации ГРАМ. Вместе с тем испытания на действующем оборудовании выявили некоторые детали, требующие дальнейшего совершенствования алгоритмов ГРАМ.
СПИСОК ЛИТЕРАТУРЫ
- Киселев Г. С., Руденский М. Я., Эпштейн Р. М. Системы группового регулирования мощности гидроэлектростанций. М.: Энергия, 1974.
- Киселев Г. С., Ляткер И. И., Нуждин В. В. Оптимизация распределения нагрузки между гидроагрегатами при помощи микро-ЭВМ. — Электрические станции, 1987, № 11.
- Киселев Г. С., Ляткер И. И., Нуждин В. В., Руденский М. Я. О принципах реализации системы группового регулирования активной мощности ГЭС на базе микро- ЭВМ. — Сб. Труды ВЭИ. Автоматическое регулирование и управление в энергосистемах, 1983.
- Методические указания по испытаниям и наладке КТС ГРАМ ГЭС. М.: Союзтехэнерго, 1988.